前の10件 | -
SISMOオーバーヘッドパネルの処遇 [Home Cockpit Build]
最近はすっかりシーナリー職人になりつつあります(笑)が、ちょいちょいデスクトップコックピットでフライトも楽しんでいます。
本当はVATSIMもやりたいんですけどねぇ…
久しぶりなので記録がてらいまの環境と課題の整理をしておきます。
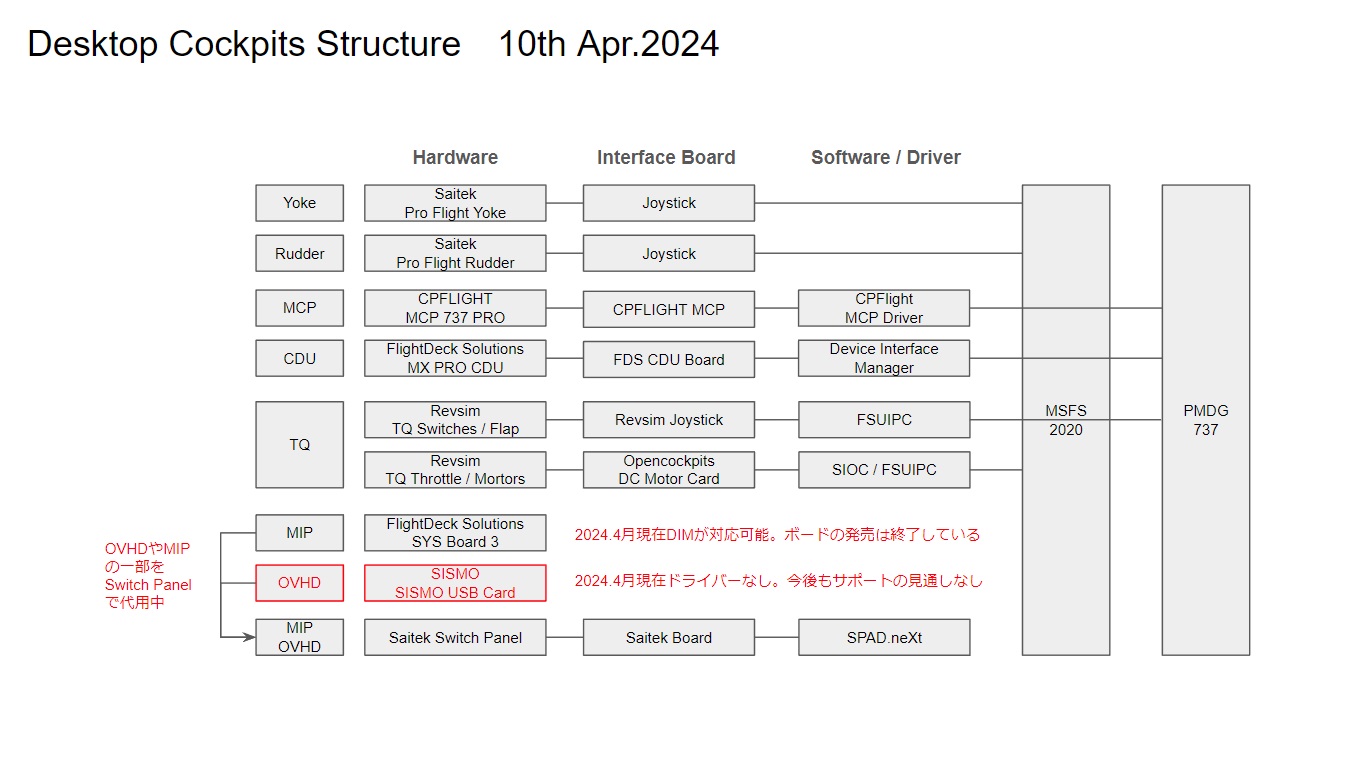
最新の環境はこんな感じ
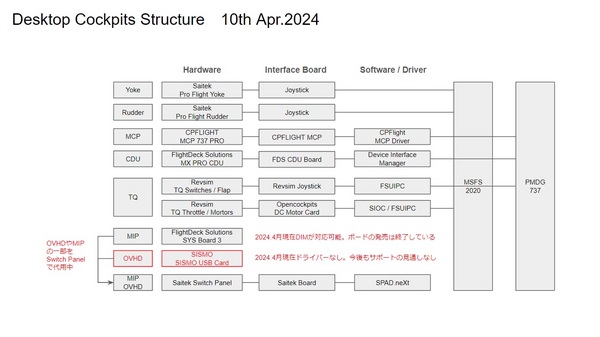
前提条件は以下
・シミュレーター MSFS2020
・機体、Avionics PMDG737
・環境 デスクトップ
まず環境的にMIPとオーバーヘッドを組むスペースがないため当面デスクトップという前提になってます。
また、Prosim737はいろんなHWをサポートしていて一番楽でいいんですが、今からのサブスクはとんでもない額になるのであきらめてPMDGに移行しています。
ということで当初(もう10年以上前)構築した際の前提と大きく変わったため、手持ちハードウェアの接続をMSFSxPMDGベースに変更してきています。
が、残課題が2点あります。
1.MIPのスイッチ、LED類が未接続
2.オーバーヘッドが未接続
MIPはそもそも組む物理的スペースがないため、主要なスイッチ類(ギア、オートブレーキ)はひとまずSaitekのSwitchパネルで運用、PFD、ND、EICASは10インチのUSBモニターでなんとかやってます。
最大の問題(?)はオーバーヘッドで、頭上にセットするスペースがないのでデスク横に接続されないまま置いてあり、可能であれば使いたいんすよね…。
いまはSaitekのSwitchパネルにプログラムで手順入れ込んでスイッチ1つでBefore Startなどの動作を再現してますが、最も高額(当時のレートで55万円くらい?)なデバイスですし、プッシュバック時のプロシージャでスイッチ触りまくるのが737の醍醐味でもあるので、なんとか再生したいです。
で、そんな課題に対して光明が。
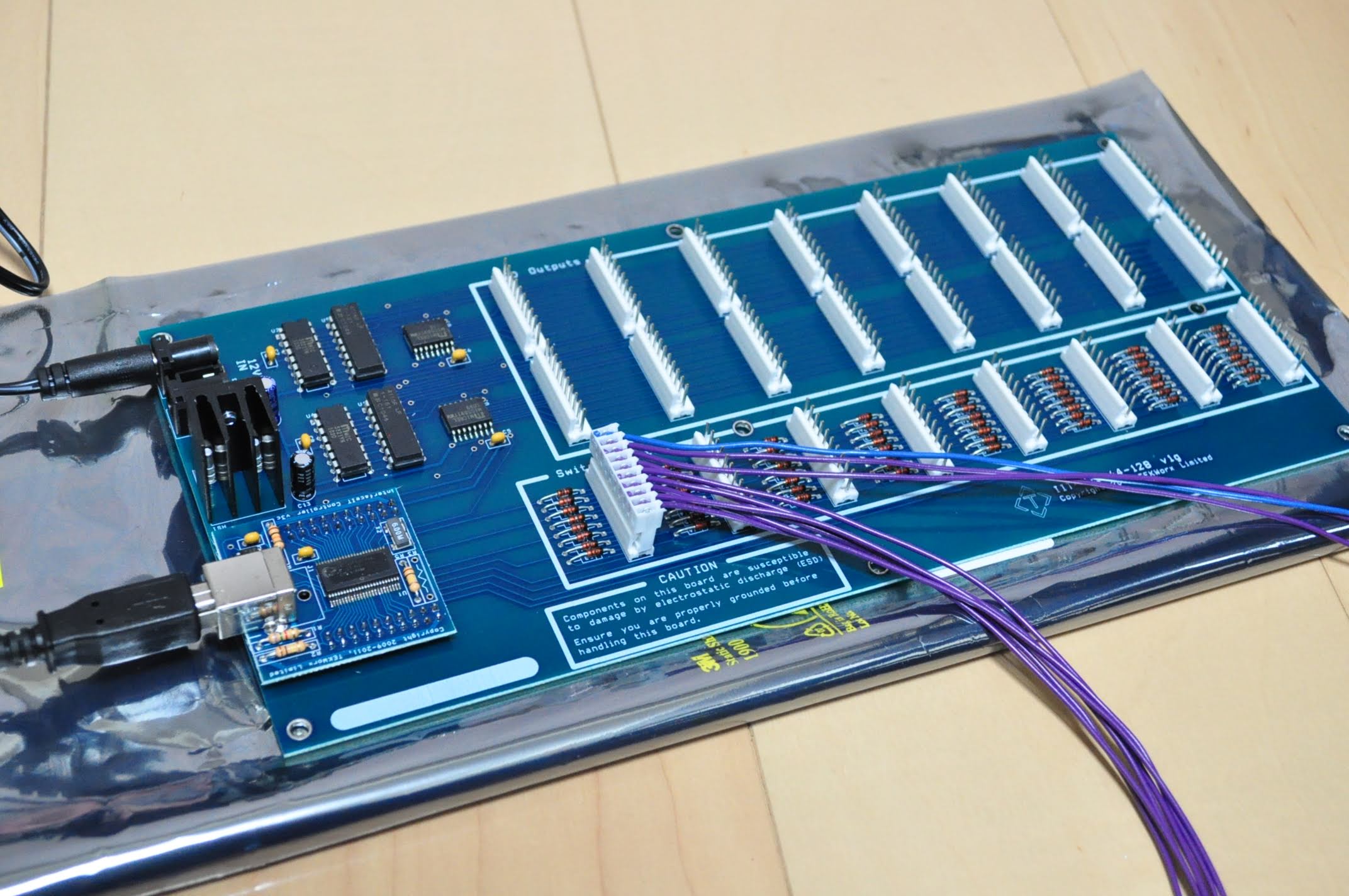
DIM(Device Interface Driver)という有志の方が開発されているFDSのインターフェイスボード用ソフトウェアがあるんですが、FDSのCDUだけでなくFDSのInterface Boardにも対応できるようになりました(すご!)
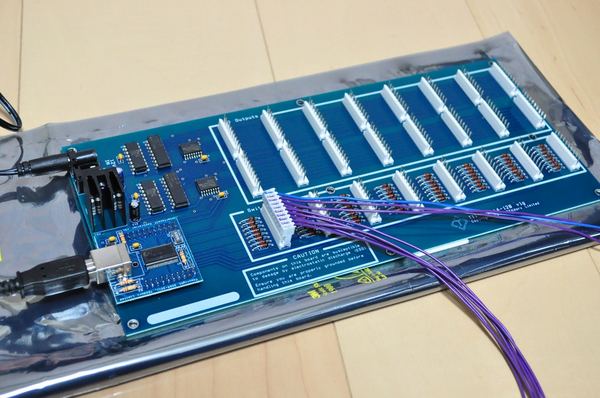
これ↓が手持ちのInterface Board(入力:64、出力:128)
入力はたぶん足りないと思われるものの、よく触るスイッチだけなら事足りそうです。
このDIMはよくできてるので多分どっかで有償化するんだろうな、とは思いますが、とてもありがたいソフトウェアです。
ということでMIPに使っていたFDSのボードをいったんオーバーヘッドに取り付けて使ってみようかと思い始めました。
今度時間を見つけて、スイッチ、LEDを接続し、実現性について確認してみようと思います。
仮にボードが使えたとしても気になるのはやはり現オーバーヘッド内のワイヤリングをいったん全部外す必要があるっていうとこですね…
どっちにしてもSISMOのボードはもう使えないのでとっぱらう以外選択肢がないんですが。
これ↓をスイッチ、LED以外とっぱらう作業…
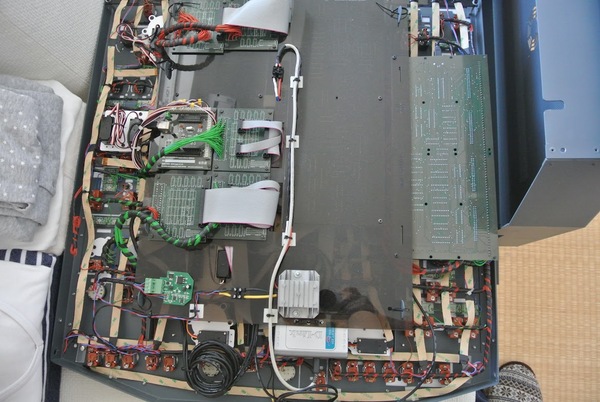
かなり気合いれてやらないと…
本当はVATSIMもやりたいんですけどねぇ…
久しぶりなので記録がてらいまの環境と課題の整理をしておきます。
最新の環境はこんな感じ
前提条件は以下
・シミュレーター MSFS2020
・機体、Avionics PMDG737
・環境 デスクトップ
まず環境的にMIPとオーバーヘッドを組むスペースがないため当面デスクトップという前提になってます。
また、Prosim737はいろんなHWをサポートしていて一番楽でいいんですが、今からのサブスクはとんでもない額になるのであきらめてPMDGに移行しています。
ということで当初(もう10年以上前)構築した際の前提と大きく変わったため、手持ちハードウェアの接続をMSFSxPMDGベースに変更してきています。
が、残課題が2点あります。
1.MIPのスイッチ、LED類が未接続
2.オーバーヘッドが未接続
MIPはそもそも組む物理的スペースがないため、主要なスイッチ類(ギア、オートブレーキ)はひとまずSaitekのSwitchパネルで運用、PFD、ND、EICASは10インチのUSBモニターでなんとかやってます。
最大の問題(?)はオーバーヘッドで、頭上にセットするスペースがないのでデスク横に接続されないまま置いてあり、可能であれば使いたいんすよね…。
いまはSaitekのSwitchパネルにプログラムで手順入れ込んでスイッチ1つでBefore Startなどの動作を再現してますが、最も高額(当時のレートで55万円くらい?)なデバイスですし、プッシュバック時のプロシージャでスイッチ触りまくるのが737の醍醐味でもあるので、なんとか再生したいです。
で、そんな課題に対して光明が。
DIM(Device Interface Driver)という有志の方が開発されているFDSのインターフェイスボード用ソフトウェアがあるんですが、FDSのCDUだけでなくFDSのInterface Boardにも対応できるようになりました(すご!)
これ↓が手持ちのInterface Board(入力:64、出力:128)
入力はたぶん足りないと思われるものの、よく触るスイッチだけなら事足りそうです。
このDIMはよくできてるので多分どっかで有償化するんだろうな、とは思いますが、とてもありがたいソフトウェアです。
ということでMIPに使っていたFDSのボードをいったんオーバーヘッドに取り付けて使ってみようかと思い始めました。
今度時間を見つけて、スイッチ、LEDを接続し、実現性について確認してみようと思います。
仮にボードが使えたとしても気になるのはやはり現オーバーヘッド内のワイヤリングをいったん全部外す必要があるっていうとこですね…
どっちにしてもSISMOのボードはもう使えないのでとっぱらう以外選択肢がないんですが。
これ↓をスイッチ、LED以外とっぱらう作業…
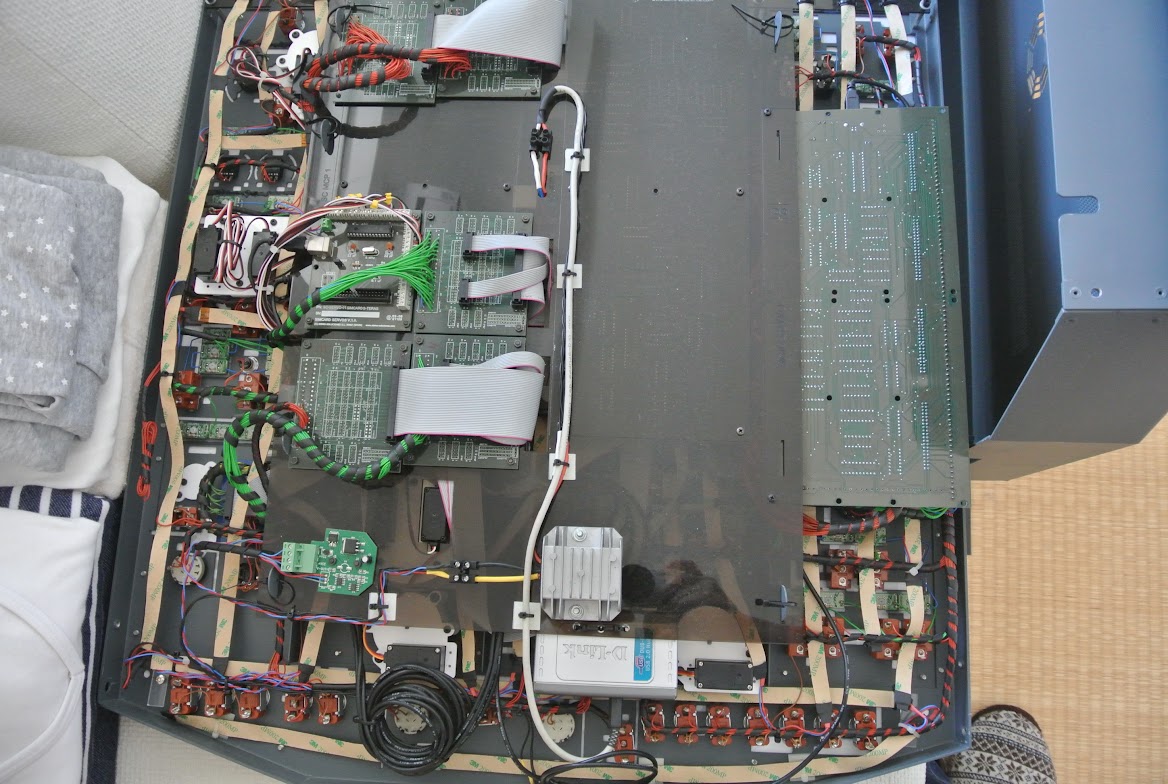
かなり気合いれてやらないと…
FDSのCDUがMSFSに対応!! [MSFS2020]
再びFDS(FlightDeck Solutions)のCDUが日の目を見る日がやってきました!
CDUってフライト中に結構触るデバイスなので使えると本当に便利。

ようやくMSFS2020のPMDG737対応ドライバーが提供されました。
ただし、FDSが正式にサポートしたわけではなく、コミュニティによるサポート。
はっきり言ってFDSはデバイスは作るけどソフトウェア対応が遅すぎる…。
XP11への対応も1個人によるサポートだったし。
もう7年くらい前のデバイスなので要求するのも無理があるかもですが、デバイスだけあっても何もできないんだから少しは考慮してほしい。
リリース当初はいろいろ不具合があり、しばらく開発されている方(Oudoum氏)とDiscord上でやりとりをしていましたがめちゃ対応が早く、あっという間に問題解決して問題なく利用できるようになりました。
◆FDSフォーラム
http://www.flightdecksolutions.com/forum/viewtopic.php?f=1&t=7318
→discordに参加
→downloadページからダウンロード
◆ソフトウェア
Device Interface Manager(略称 D.I.M.)
利用方法も超簡単。
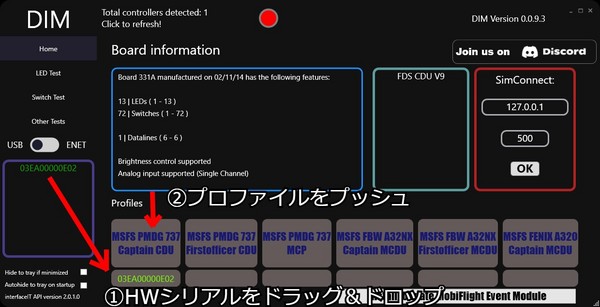
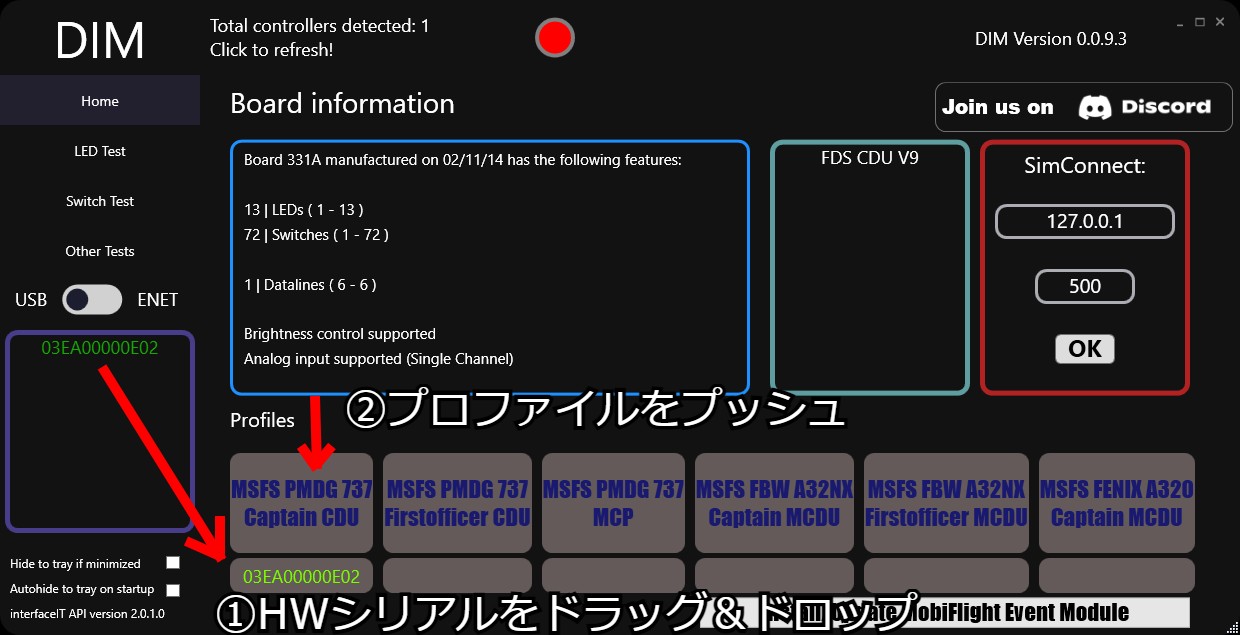
[準備]
CDUデバイスを接続(自分の場合はUSBバージョン)。DIMを起動。自動的にHWのシリアルコードを取得。
①シリアルを利用したいプロファイルにドロップ
[利用]
②プロファイルボタンをプッシュ
以上!簡単!
初回以降は起動して②の操作を行うだけ。
このデバイスマネージャーは非常に有能。ありがたや…。
これでMSFSのPMDGに対応していないのは手持ちデバイスだと2つ。
・FlightDeck SolutionsのITSYSボード(MIPのスイッチ類接続用)
・SISMOのオーバヘッドパネル
ただ、このDIMがITSYSボードも認識できるようなので、やりようによってはすでに使えるのかもしれませんが未検証なので暇なときにでもやってみようかと思ってます。
デスクトップコックピット(MSFSxPMDG737)で飛んでる分にはひとまず問題ない状態になり、それなりの手順とともにフライトが楽しめるようになりました!^-^
CDUってフライト中に結構触るデバイスなので使えると本当に便利。

ようやくMSFS2020のPMDG737対応ドライバーが提供されました。
ただし、FDSが正式にサポートしたわけではなく、コミュニティによるサポート。
はっきり言ってFDSはデバイスは作るけどソフトウェア対応が遅すぎる…。
XP11への対応も1個人によるサポートだったし。
もう7年くらい前のデバイスなので要求するのも無理があるかもですが、デバイスだけあっても何もできないんだから少しは考慮してほしい。
リリース当初はいろいろ不具合があり、しばらく開発されている方(Oudoum氏)とDiscord上でやりとりをしていましたがめちゃ対応が早く、あっという間に問題解決して問題なく利用できるようになりました。
◆FDSフォーラム
http://www.flightdecksolutions.com/forum/viewtopic.php?f=1&t=7318
→discordに参加
→downloadページからダウンロード
◆ソフトウェア
Device Interface Manager(略称 D.I.M.)
利用方法も超簡単。
[準備]
CDUデバイスを接続(自分の場合はUSBバージョン)。DIMを起動。自動的にHWのシリアルコードを取得。
①シリアルを利用したいプロファイルにドロップ
[利用]
②プロファイルボタンをプッシュ
以上!簡単!
初回以降は起動して②の操作を行うだけ。
このデバイスマネージャーは非常に有能。ありがたや…。
これでMSFSのPMDGに対応していないのは手持ちデバイスだと2つ。
・FlightDeck SolutionsのITSYSボード(MIPのスイッチ類接続用)
・SISMOのオーバヘッドパネル
ただ、このDIMがITSYSボードも認識できるようなので、やりようによってはすでに使えるのかもしれませんが未検証なので暇なときにでもやってみようかと思ってます。
デスクトップコックピット(MSFSxPMDG737)で飛んでる分にはひとまず問題ない状態になり、それなりの手順とともにフライトが楽しめるようになりました!^-^
【更新】CPFlight x MSFS x PMDG737 [Home Cockpit Build]
22年9月9日更新
いつの間にかCPFLIGHTから最新ドライバーV3.77(8月22日)がリリースされてました。
これまでの課題が全部解決されているようで、接続不良もなく、全機能問題なく動くようになりました!
新たに動作確認できたこと
・AT ARMスイッチ電磁解除が可能に
・バックライト点灯/消灯が可能に(シム内PMDGのスイッチ操作でHW上のバックライトを操作)
・高度計などデジタル表示の遅延解消
・VNAV設定後に表示されていた謎の110という表示も解消
いや、快適。
ありがとうCPFLIGHT!
FlightDeck Solutionsは静かなまま…。いつドライバー出してくれるんだろうか…。
---以下は旧投稿---
先日22年6月14日にCPFlightからMSFSのPMDG737に100%コンパチしたぜ!
というアナウンスとともに、新しいドライバーバージョン376Bがリリースされました。
これを入れたところで何も変化がないという状態でしたが、とりあえずの解決方法がわかりましたので記録しておきます。
CPFlight CEOのPaoloに以下手順を指南いただき、悩みながら一部手順を変更して実施したところ無事にHWとSWのコミュニケーションが行われるようになりました。
まだMSFSのPMDGが正式なSDKを出してないため、旧式SDKを暫定的に利用しているようです。
どうも最初の疎通開始がうまくいかないようで、以下のように触っていると通信できるようになります。
<解決前>
〇 CPFlight→PMDG デバイスからの入力はすべてできる
[×] PMDG→CPFlight シムからのデータが来ないためLEDが点灯しない
<解決後>
〇 CPFlight→PMDG デバイスからの入力はすべてできる
〇 PMDG→CPFlight LEDがシムとリンクして点灯
※ただし、A/T ARMスイッチの電磁解除スイッチは作動しません。
<以下手順の前にやっておくこと>
1-) FSUIPCをアンインストール、フォルダごと削除。再インストール
2-) CPFlightのドライバーをアンインストール、フォルダごと削除。再インストール
3-) fsuipc.ini内に以下2行の記述があることを確認
[WAPI]
EnableWAPI=Yes
<解決手順>
1-) MSFS起動
2-) PMDG737を起動
3-) 電源ON、APUが入った状態
4-) 画面上のMCP ATARMスイッチをマウスで「on」、「off」を何度か切替え、最後は「off」にする
5-) FSUIPC7のメニューから WASM>list of LVAR内のngx_MCPATArmが0になっていることを確認
6-) FSUIPC7を閉じる(FSUIPCのアプリWindowではなくアプリそのものをいったん閉じる)
7-) 画面上のMCP ATARMスイッチをマウスで「on」にする
8-) FSUIPC7を再起動しメニューから WASM>list of LVAR内のngx_MCPATArmが1になっていることを確認
9-) この状態でCPFlight MCPの電源をON
10-) CPFlightのFS_COMを起動してconnect
11-) VNAV等をプッシュして緑色LEDの点灯を確認する(当然フライトプランが入ってないと点灯しません)
<検証環境>
- Hardware MCP737Pro(I bought this hardware in 2010)
- CPFlight Driver 3.76B
- Firmware 1.31
- PMDG737 Newest version(First updated)
- FSUIPC 7.3.6
- MSFS 1.26.5.0
旧型のMCPをお持ちでPMDGと通信がうまくいかないかたはお試しください。
新型のMCPの場合はファームウェアアップデートでつながる事例もあるようです。
また、上記の手順1回目で確認できない場合は、2度、3度やっているとつながります。(なんじゃそりゃ)
いつの間にかCPFLIGHTから最新ドライバーV3.77(8月22日)がリリースされてました。
これまでの課題が全部解決されているようで、接続不良もなく、全機能問題なく動くようになりました!
新たに動作確認できたこと
・AT ARMスイッチ電磁解除が可能に
・バックライト点灯/消灯が可能に(シム内PMDGのスイッチ操作でHW上のバックライトを操作)
・高度計などデジタル表示の遅延解消
・VNAV設定後に表示されていた謎の110という表示も解消
いや、快適。
ありがとうCPFLIGHT!
FlightDeck Solutionsは静かなまま…。いつドライバー出してくれるんだろうか…。
---以下は旧投稿---
これを入れたところで何も変化がないという状態でしたが、とりあえずの解決方法がわかりましたので記録しておきます。
CPFlight CEOのPaoloに以下手順を指南いただき、悩みながら一部手順を変更して実施したところ無事にHWとSWのコミュニケーションが行われるようになりました。
まだMSFSのPMDGが正式なSDKを出してないため、旧式SDKを暫定的に利用しているようです。
どうも最初の疎通開始がうまくいかないようで、以下のように触っていると通信できるようになります。
<解決前>
〇 CPFlight→PMDG デバイスからの入力はすべてできる
[×] PMDG→CPFlight シムからのデータが来ないためLEDが点灯しない
<解決後>
〇 CPFlight→PMDG デバイスからの入力はすべてできる
〇 PMDG→CPFlight LEDがシムとリンクして点灯
※ただし、A/T ARMスイッチの電磁解除スイッチは作動しません。
<以下手順の前にやっておくこと>
1-) FSUIPCをアンインストール、フォルダごと削除。再インストール
2-) CPFlightのドライバーをアンインストール、フォルダごと削除。再インストール
3-) fsuipc.ini内に以下2行の記述があることを確認
[WAPI]
EnableWAPI=Yes
<解決手順>
1-) MSFS起動
2-) PMDG737を起動
3-) 電源ON、APUが入った状態
4-) 画面上のMCP ATARMスイッチをマウスで「on」、「off」を何度か切替え、最後は「off」にする
5-) FSUIPC7のメニューから WASM>list of LVAR内のngx_MCPATArmが0になっていることを確認
6-) FSUIPC7を閉じる(FSUIPCのアプリWindowではなくアプリそのものをいったん閉じる)
7-) 画面上のMCP ATARMスイッチをマウスで「on」にする
8-) FSUIPC7を再起動しメニューから WASM>list of LVAR内のngx_MCPATArmが1になっていることを確認
9-) この状態でCPFlight MCPの電源をON
10-) CPFlightのFS_COMを起動してconnect
11-) VNAV等をプッシュして緑色LEDの点灯を確認する(当然フライトプランが入ってないと点灯しません)
<検証環境>
- Hardware MCP737Pro(I bought this hardware in 2010)
- CPFlight Driver 3.76B
- Firmware 1.31
- PMDG737 Newest version(First updated)
- FSUIPC 7.3.6
- MSFS 1.26.5.0
旧型のMCPをお持ちでPMDGと通信がうまくいかないかたはお試しください。
新型のMCPの場合はファームウェアアップデートでつながる事例もあるようです。
また、上記の手順1回目で確認できない場合は、2度、3度やっているとつながります。(なんじゃそりゃ)
【22.8月更新】PMDG737とRevsimTQの接続 [MSFS2020]
MSFSのPMDG737のスロットルをRevsimTQで操作したい、という要件です。
想定はしていましたが、やはりすんなりは接続できません。
PMDGのSDKの問題なのか、FSUIPC側の問題なのか、はたまた別の問題なのかはいまのところよくわかりません…。
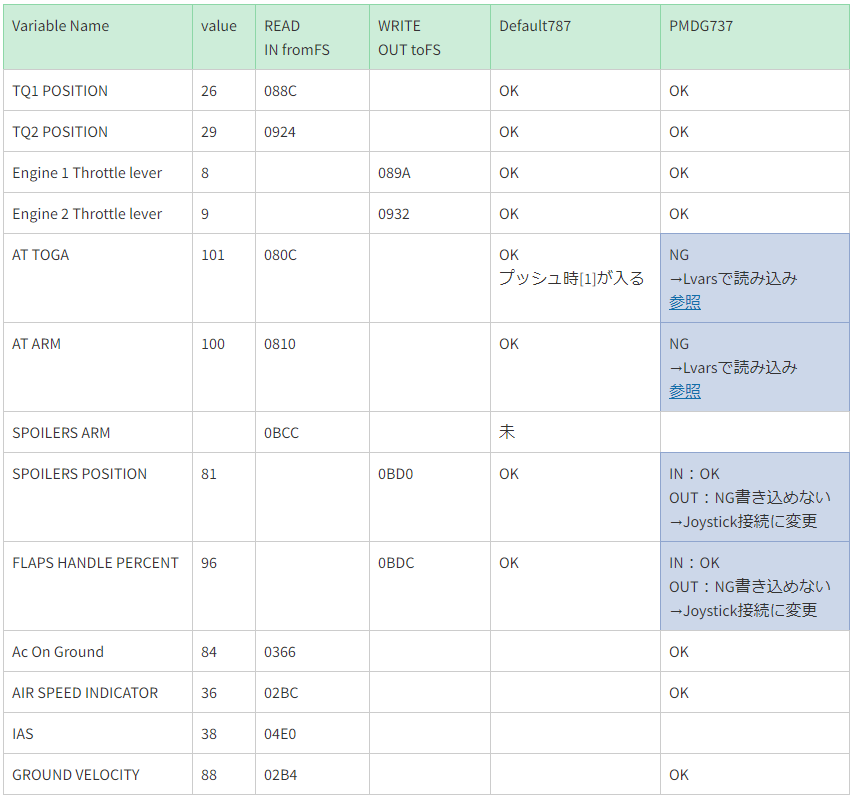
正常に動くデフォルトB787と比較すると以下のような整理になります。
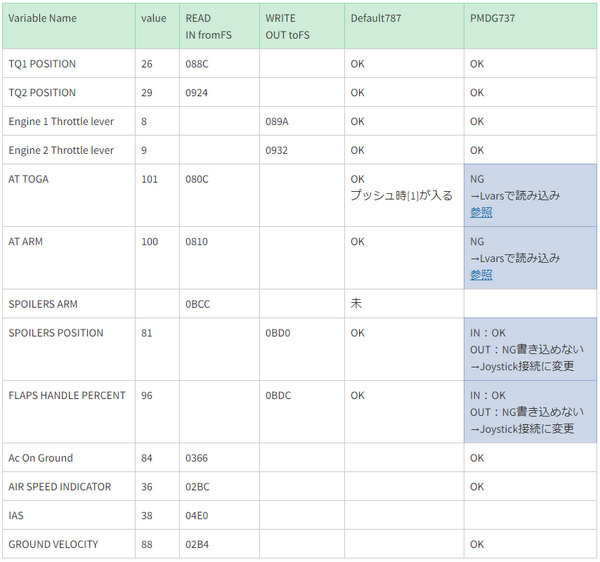
スロットルは動くし、強制的にスクリプト上でATモードに入れてあげれば一応モーターも動きます。
スポイラーとフラップのハードウェアからの入力値がPMDGに入らず、ATアーム関連のデータがFSUIPCに入ってこないという問題があって今のところ使い物になりません。
→ジョイスティック入力への変更とLvars経由での値取得で解決。
デフォルト機にはきちんと入力できることを考えると、PMDGのSDKがまだ不十分なのかなーとも思ったり。
これまた少し時間かかりそうなので、しばし放置して当面はSaitekのスロットルでフライトを楽しむことにします。
長期間趣味としてたしなんでいると、新しい環境に接続を切り替えていくのがほんと大変です。
HWにお金がすごくかかるのに、サポートは切れるので、SWとHWのIFを担保するミドルウェア的なものが必要だなと改めて感じた次第。
結局、高額なProsimがその役割もこなしてるわけなんですけどね…。
この辺↓がそういう位置付けなのかもしれませんが、まだ未検証です。
https://www.spadnext.com/home.html
http://www.flightsim4fun.com/index.html
22.8月追記
上記課題をひとまずクリアしたので更新メモ
①ATTOGA、②ATARMがPMDGからFSUIPC経由でSIOCに取得できない問題
この2件は、LVARS経由で取得することでクリア。作業としては非常に簡単だけど、たったこれだけの情報を得るのにかなり調査に時間がかかった…。
LVARSはいろいろ応用が利きそうだけど正直まだ全然理解が足りてないので今後ちまちま学ぶことに。
1.fsuipc.iniに以下2行を追加
[LvarOffsets]
1=ngx_MCP_ATArm=UB0932
2=TOGAPush=UB080C
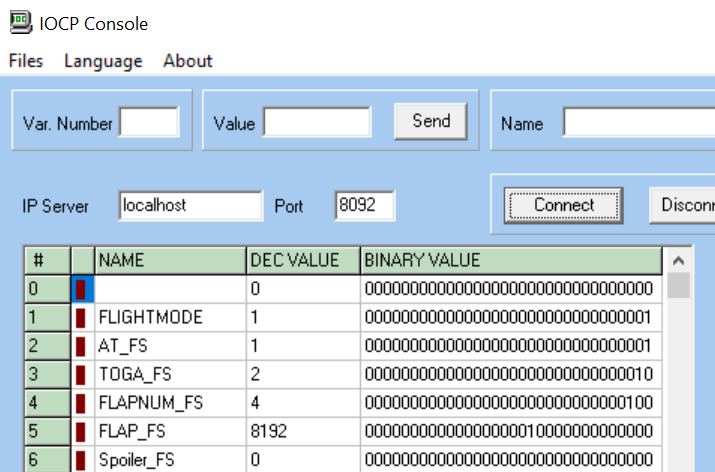
2.SIOCで以下コードを記載
Var 0002, name AT_FS, Link FSUIPC_IN, Offset $0932, Length 4 // Get from Lvars in fsuipc.ini
Var 0003, name TOGA_FS, Link FSUIPC_IN, Offset $080C, Length 4 // Get from Lvars in fsuipc.ini
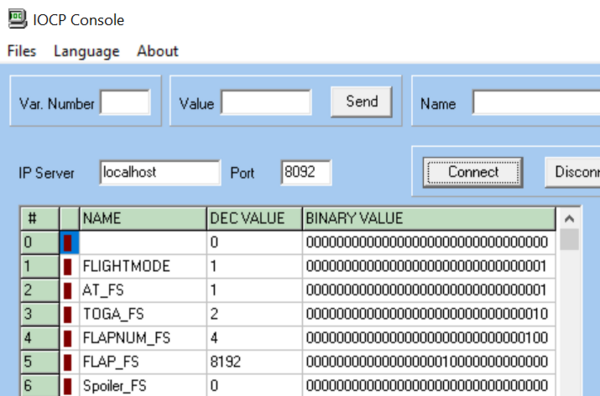
3.SIOCのIOCP Console上でデータ確認
4.SIOCで必要に応じてプログラム
ATがARMされていたら…、TOGAがプッシュされたら…などの条件組み合わせでTQのモーターへ信号を送る。
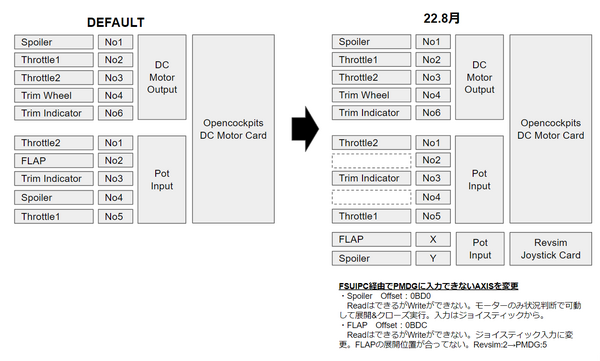
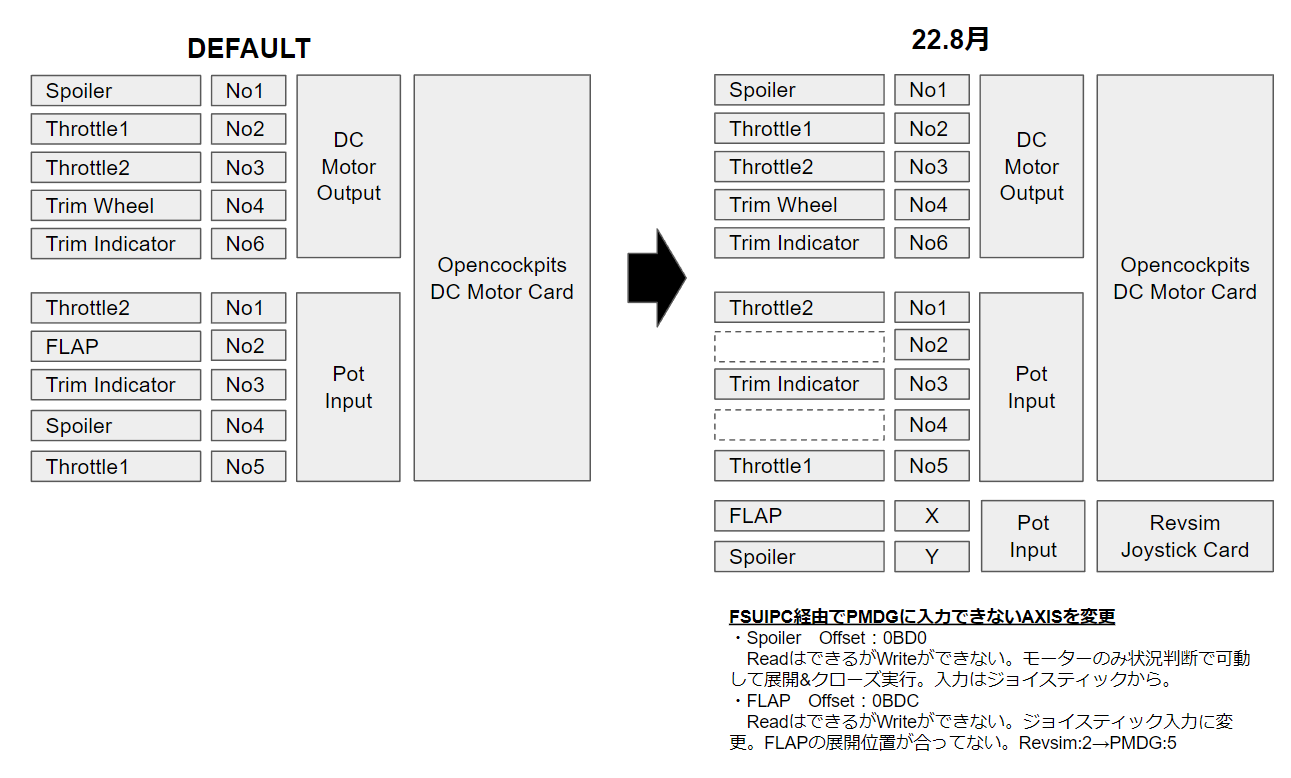
③Spoiler、④FLAPがSIOCからFSUIPC経由でPMDGに書き込めない問題
この2件は、HW接続を変えて対応することにしました。
基本SIOCからスポイラーとフラップが入力できればよいので、TQ内にもう1枚あるJoystickカードの入力に接続そのものを変更。
スポイラーはモーター駆動も必要なため、地上か空中か、速度はいくつか、リバーサーは動いているかなどで判断して信号を送るよう簡単なプログラムで実装。
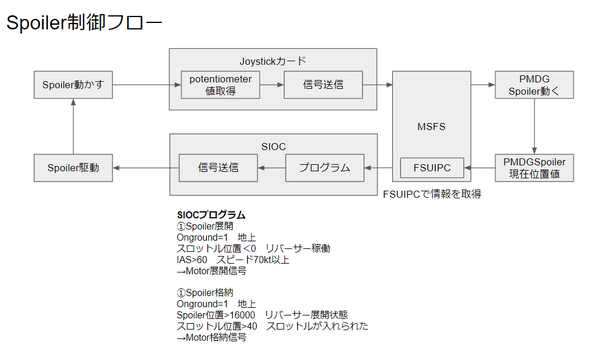
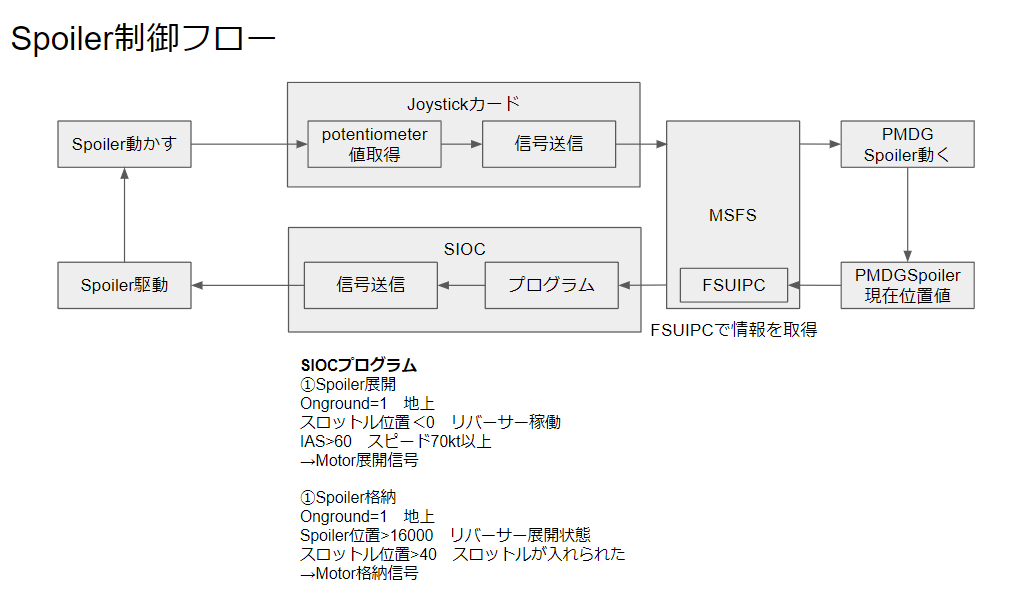
ちなみにSpoilerは以下のようなフローで制御
TQのハードから入力し、PMDG内のSpoilerを動かす。
その位置をFSUIPC経由で取得(取得はできる)し、その位置と他の機体情報を組み合わせてモーターを駆動させ、HWが動いた結果がまたPMDGに入力されてSpoilerが動く、というサイクル。
RevsimTQのMSFSxPMDG737への接続は一応やりたいことはできるようになったのでOK。
これでMSFSxPMDG737もRevsimTQで飛べる!!
あと接続できてないのは、FDSのCDU、MIP、SISMOのOVHDの3つ。
いずれもドライバーが出てないのでまだ待ち。SISMOにいたってはシステムボードを変えないとほぼ不可能…。
もはや円安と年経過でProsim更新料がとんでもない金額になってるので、ちまちまPMDGをHWでコントロールする環境を作っていこうと思います。
ま、これはこれで楽しいからいいんだけど(^^;
想定はしていましたが、やはりすんなりは接続できません。
正常に動くデフォルトB787と比較すると以下のような整理になります。
スロットルは動くし、強制的にスクリプト上でATモードに入れてあげれば一応モーターも動きます。
スポイラーとフラップのハードウェアからの入力値がPMDGに入らず、ATアーム関連のデータがFSUIPCに入ってこないという問題
→ジョイスティック入力への変更とLvars経由での値取得で解決。
長期間趣味としてたしなんでいると、新しい環境に接続を切り替えていくのがほんと大変です。
HWにお金がすごくかかるのに、サポートは切れるので、SWとHWのIFを担保するミドルウェア的なものが必要だなと改めて感じた次第。
結局、高額なProsimがその役割もこなしてるわけなんですけどね…。
この辺↓がそういう位置付けなのかもしれませんが、まだ未検証です。
https://www.spadnext.com/home.html
http://www.flightsim4fun.com/index.html
22.8月追記
上記課題をひとまずクリアしたので更新メモ
①ATTOGA、②ATARMがPMDGからFSUIPC経由でSIOCに取得できない問題
この2件は、LVARS経由で取得することでクリア。作業としては非常に簡単だけど、たったこれだけの情報を得るのにかなり調査に時間がかかった…。
LVARSはいろいろ応用が利きそうだけど正直まだ全然理解が足りてないので今後ちまちま学ぶことに。
1.fsuipc.iniに以下2行を追加
[LvarOffsets]
1=ngx_MCP_ATArm=UB0932
2=TOGAPush=UB080C
2.SIOCで以下コードを記載
Var 0002, name AT_FS, Link FSUIPC_IN, Offset $0932, Length 4 // Get from Lvars in fsuipc.ini
Var 0003, name TOGA_FS, Link FSUIPC_IN, Offset $080C, Length 4 // Get from Lvars in fsuipc.ini
3.SIOCのIOCP Console上でデータ確認
4.SIOCで必要に応じてプログラム
ATがARMされていたら…、TOGAがプッシュされたら…などの条件組み合わせでTQのモーターへ信号を送る。
③Spoiler、④FLAPがSIOCからFSUIPC経由でPMDGに書き込めない問題
この2件は、HW接続を変えて対応することにしました。
基本SIOCからスポイラーとフラップが入力できればよいので、TQ内にもう1枚あるJoystickカードの入力に接続そのものを変更。
スポイラーはモーター駆動も必要なため、地上か空中か、速度はいくつか、リバーサーは動いているかなどで判断して信号を送るよう簡単なプログラムで実装。
ちなみにSpoilerは以下のようなフローで制御
TQのハードから入力し、PMDG内のSpoilerを動かす。
その位置をFSUIPC経由で取得(取得はできる)し、その位置と他の機体情報を組み合わせてモーターを駆動させ、HWが動いた結果がまたPMDGに入力されてSpoilerが動く、というサイクル。
RevsimTQのMSFSxPMDG737への接続は一応やりたいことはできるようになったのでOK。
これでMSFSxPMDG737もRevsimTQで飛べる!!
あと接続できてないのは、FDSの
いずれもドライバーが出てないのでまだ待ち。SISMOにいたってはシステムボードを変えないとほぼ不可能…。
もはや円安と年経過でProsim更新料がとんでもない金額になってるので、ちまちまPMDGをHWでコントロールする環境を作っていこうと思います。
ま、これはこれで楽しいからいいんだけど(^^;
【22/3/13更新】MSFS2020にProsim V3を導入 [Home Cockpit Build]
22/3/13更新Prosim ライト問題解決に合わせて更新
21/12/16更新Prosim V3.13リリースに合わせて追記
実はまだProsimのサブスク契約を更新してないため、トライアルモードでの導入になりますが、おおむね動作には問題ない状態に仕上がってきました。
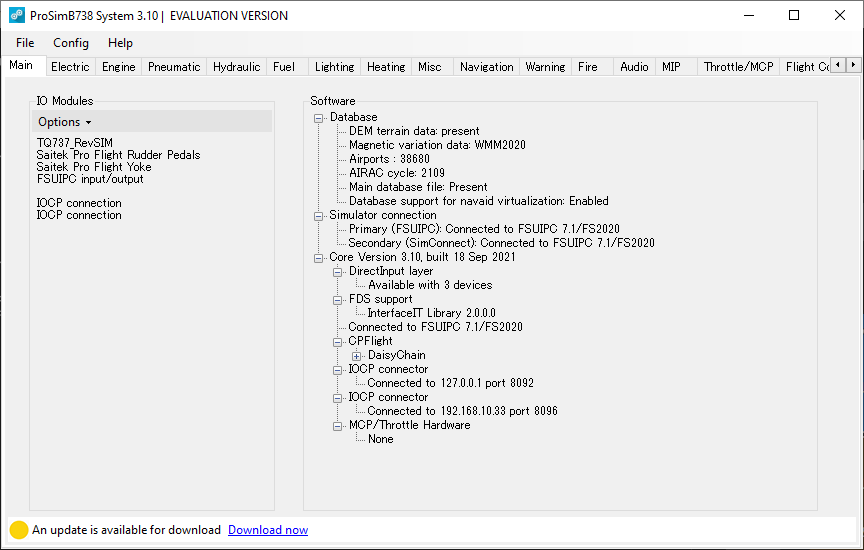
接続概要は以下の通りです。
■ソフトウェア
MSFS V1.21.13.0
Prosim V3.15
Flight Model V1.07
■ハードウェア
- MCP CPFLIGHT(Prosim接続)
- CDU Flightdeck Solutions(Prosim接続)
- TQ RevolutionSim Products(SIOC→FSUIPC接続) ※FSUIPC用ScriptなのでProsim挟まず直結
- OVHD SISMO(SC-PASCAL→Prosim接続)
- Yoke Saitek、Ladder(Prosim接続)
■接続
SIM、HW接続完了状態
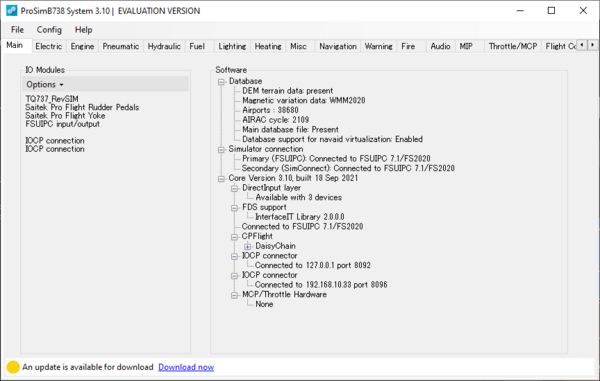
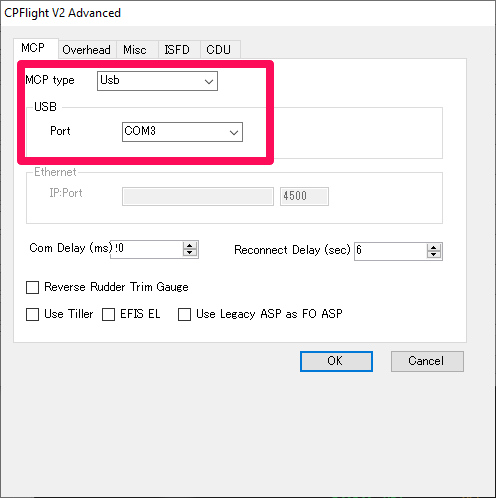
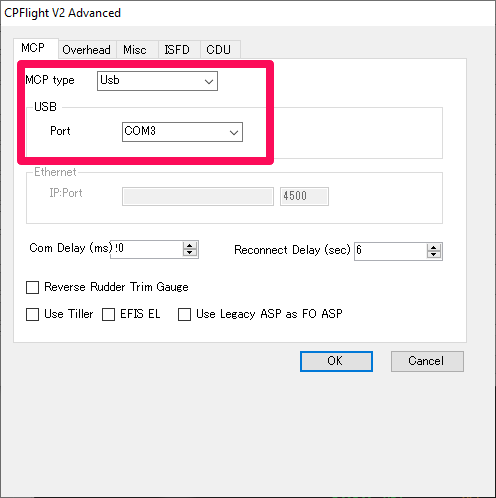
CPFlight MCPセットアップ(メインのconfig)
USBポートをセットすればOK。
FDS CDUセットアップ(CDUモジュールのconfig)
USB接続すると勝手に表示されるCDUシリアルを選択すればOK。
.png)
RevsimTQのセットアップ
ローカル上でSIOC起動
-aa7ef.png)
SISMOOVHDのセットアップ
32bitOS上でSC-PASCALを起動し、Prosimでアドレスとポートを指定してやればOK
-ac6d6.png)
■Flight Model
Flight Modelは22年3月時点でV1.07までリリースされてます。
- v1.01 LEGACYモード。挙動がおかしい。機体が滑る感じで違和感がすごい。
- v1.02 v1.01の不具合は解消。フライトコントロールに問題なし。このバージョンからフライトモデル「Modern」に対応。
- v1.03 同上。フライトコントロールに大きな変更はない模様。
- v1.04 エルロンがほぼきかず、じわーっとしか曲がれない。→Configファイル一部変更で解決
- v1.05 上記対応は不要。特にマニュアル飛行上の問題は感じない。
- v1.06 大きな変更はなく、VNAV、LVLCHGがまだちゃんと動かない。以下不具合に記載。
Prosim本体を3.13に更新するとVNAV、LVLCHGも正常に作動
- v1.07 大きな変更はなし
■Flight Controls設定
- 入力は原則以下のようにProsim737から行う
- MSFSのAxes入力は全削除
- FSUIPCのAxes入力は全削除
必ずしも操縦系統もProsim737にいれないとダメかというとそうでもなく、ラダーやブレーキ、リバーサーなどは直接MSFSにつなげたり、FSUIPCで設定したり使い分けても特に問題はないです。
というか、ラダーはProsim737につなげると挙動がおかしい(曲がりが甘い)ので、MSFSに直結するように後で変更しました。
ケースバイケースでよさそうです。
以下はあくまでも参考。
エルロン/エレベーター/ラダー/ブレーキ
.png)
リバーサー
-8428f.png)
エルロン等キャリブレーション
-d047b.png)
■21年12月16日時点の不具合
いくつか不具合があり、未解決なものもあります。
また、MSFS本体がアップデートされるたびにFlight Modelもアップデートが必要になるケースもあるようで、なかなか安定状態にはなりません。
MSFSは強制UPDATEなのでここがビルダーにとってはネックかもしれませんし、トラブルシュートが好きな人にとっては、逆に楽しいのかも…
自分はどっちかというと後者の気もあり(笑)
21/12/16追記 V3.13によって抱えていた事象はすべて解決となり、通常のフライトに全く問題は見当たらなくなりました。
ハードウェアも正常に動作し、飛行も安定、課題だったオートパイロット(特に上下方向)もチューニングされて正常に動作しています。
エクステリアのライトは相変わらず点灯しませんが、操縦系統に問題は見当たらない状態になりました。
こうなるとひとまず5万円でアップデートしてもいいかなーと思ってしまいます(^^;
が、今後もMSFSの強制アップデートが続くことを考えるとProsimのアップデートも続くのでサブスク離れられなくなりますし、非常に悩みどころです。
1.VNAV、LVL CHGが安定しない【SOLVED】
事象:上昇中、下降中に上下動を繰り返しながら上昇(下降)する。設定高度には留まる。
原因:フライトモデルの問題の模様 フライトモデル[×]Prosim本体?
対処:Prosimの対応待ち 21/12/16 Prosimv3.13、FlightModel v1.06で解消
情報:https://forum.prosim-ar.com/viewtopic.php?f=13&t=23406
2.左右に微量しか旋回しない【SOLVED】
事象:エルロンを左右に動かしても微量しか旋回できない。Prosim設定のTuningを変更しても変わらず。
原因:Prosimフライトモデルの問題
対処:フライトモデルのconfigファイルから一行削除→21/11/17 FlightModel v1.05で解消しており対応は不要。
情報:https://forum.prosim-ar.com/viewtopic.php?f=13&t=23369
3.着陸時に急激にスピンしてクラッシュする【SOLVED】
事象:接地時(リバース/ブレーキ/スポイラー展開)にほぼ毎回クラッシュする。
原因:FSUIPCへの入力値が制限を超えていたことが原因。
対処:これは個人固有の環境に依存する問題だったためSIOC Script変更で解決済み。
情報:-
4.OVHD右上のゲージ(室内温度)が勝手に動く【CLOSE】
事象:機内温度計の動きが異常(たまに急激な上昇と下降を繰り返して20℃くらいに停止する)
原因:不明(ゲージのIOCPオフセットに不正な値が渡されているためと思われるが出所が不明)
対処:不明 再現性がないためいったんクローズ
情報:-
その他、ランディングライトをはじめとする軽微なものは色々ありそうですが、ひとまず通常のフライトであれば問題なさそうなレベルです。
22/3/13 ランディングライトはフライトモデルのv1.00(ProSimB738-MSFS2020_Flight_Model v1.00_setup.exe)を入れることで解決。ライトエフェクトがこれにしかはいってないのかもしれません。 自分の場合、Moduleのv1.00(ProSim_FS2020_Module_v1.00_setup.exe)も同時にインストールしたため、どちらが正しいのかわかりませんが、いずれにしても両方入れた後にv1.07の上書きでライト問題は解消です。 くまちゃんさん情報提供ありがとうございました。
フライト動画は別途撮ってみようと思ってます。
今は以下のようなデスクトップコックピットですが…。

サブスク更新するか否か…
CPFlightとSISMOをFSUIPCやSimconnectで直結できるようになれば必ずしもProsimに依存しなくてもいいんですが、ここはちょっと深めの思案中です。
(V3への更新に5.3万円かかるので)
21/12/16更新Prosim V3.13リリースに合わせて追記
実はまだProsimのサブスク契約を更新してないため、トライアルモードでの導入になりますが、おおむね動作には問題ない状態に仕上がってきました。
接続概要は以下の通りです。
■ソフトウェア
MSFS V1.21.13.0
Prosim V3.15
Flight Model V1.07
■ハードウェア
- MCP CPFLIGHT(Prosim接続)
- CDU Flightdeck Solutions(Prosim接続)
- TQ RevolutionSim Products(SIOC→FSUIPC接続) ※FSUIPC用ScriptなのでProsim挟まず直結
- OVHD SISMO(SC-PASCAL→Prosim接続)
- Yoke Saitek、Ladder(Prosim接続)
■接続
SIM、HW接続完了状態
CPFlight MCPセットアップ(メインのconfig)
USBポートをセットすればOK。
FDS CDUセットアップ(CDUモジュールのconfig)
USB接続すると勝手に表示されるCDUシリアルを選択すればOK。
.png)
RevsimTQのセットアップ
ローカル上でSIOC起動
-aa7ef.png)
SISMOOVHDのセットアップ
32bitOS上でSC-PASCALを起動し、Prosimでアドレスとポートを指定してやればOK
-ac6d6.png)
■Flight Model
Flight Modelは22年3月時点でV1.07までリリースされてます。
- v1.01 LEGACYモード。挙動がおかしい。機体が滑る感じで違和感がすごい。
- v1.02 v1.01の不具合は解消。フライトコントロールに問題なし。このバージョンからフライトモデル「Modern」に対応。
- v1.03 同上。フライトコントロールに大きな変更はない模様。
- v1.04 エルロンがほぼきかず、じわーっとしか曲がれない。→Configファイル一部変更で解決
- v1.05 上記対応は不要。特にマニュアル飛行上の問題は感じない。
- v1.06 大きな変更はなく、VNAV、LVLCHGがまだちゃんと動かない。以下不具合に記載。
Prosim本体を3.13に更新するとVNAV、LVLCHGも正常に作動
- v1.07 大きな変更はなし
■Flight Controls設定
- 入力は原則以下のようにProsim737から行う
- MSFSのAxes入力は全削除
- FSUIPCのAxes入力は全削除
必ずしも操縦系統もProsim737にいれないとダメかというとそうでもなく、ラダーやブレーキ、リバーサーなどは直接MSFSにつなげたり、FSUIPCで設定したり使い分けても特に問題はないです。
というか、ラダーはProsim737につなげると挙動がおかしい(曲がりが甘い)ので、MSFSに直結するように後で変更しました。
ケースバイケースでよさそうです。
以下はあくまでも参考。
エルロン/エレベーター/ラダー/ブレーキ
.png)
リバーサー
-8428f.png)
エルロン等キャリブレーション
-d047b.png)
21/12/16追記 V3.13によって抱えていた事象はすべて解決となり、通常のフライトに全く問題は見当たらなくなりました。
ハードウェアも正常に動作し、飛行も安定、課題だったオートパイロット(特に上下方向)もチューニングされて正常に動作しています。
エクステリアのライトは相変わらず点灯しませんが、操縦系統に問題は見当たらない状態になりました。
こうなるとひとまず5万円でアップデートしてもいいかなーと思ってしまいます(^^;
が、今後もMSFSの強制アップデートが続くことを考えるとProsimのアップデートも続くのでサブスク離れられなくなりますし、非常に悩みどころです。
1.VNAV、LVL CHGが安定しない【SOLVED】
事象:上昇中、下降中に上下動を繰り返しながら上昇(下降)する。設定高度には留まる。
原因:
対処:
情報:https://forum.prosim-ar.com/viewtopic.php?f=13&t=23406
2.左右に微量しか旋回しない【SOLVED】
事象:エルロンを左右に動かしても微量しか旋回できない。Prosim設定のTuningを変更しても変わらず。
原因:Prosimフライトモデルの問題
対処:
情報:https://forum.prosim-ar.com/viewtopic.php?f=13&t=23369
3.着陸時に急激にスピンしてクラッシュする【SOLVED】
事象:接地時(リバース/ブレーキ/スポイラー展開)にほぼ毎回クラッシュする。
原因:FSUIPCへの入力値が制限を超えていたことが原因。
対処:これは個人固有の環境に依存する問題だったためSIOC Script変更で解決済み。
情報:-
4.OVHD右上のゲージ(室内温度)が勝手に動く【CLOSE】
事象:機内温度計の動きが異常(たまに急激な上昇と下降を繰り返して20℃くらいに停止する)
原因:不明(ゲージのIOCPオフセットに不正な値が渡されているためと思われるが出所が不明)
対処:不明 再現性がないためいったんクローズ
情報:-
22/3/13 ランディングライトはフライトモデルのv1.00(ProSimB738-MSFS2020_Flight_Model v1.00_setup.exe)を入れることで解決。ライトエフェクトがこれにしかはいってないのかもしれません。 自分の場合、Moduleのv1.00(ProSim_FS2020_Module_v1.00_setup.exe)も同時にインストールしたため、どちらが正しいのかわかりませんが、いずれにしても両方入れた後にv1.07の上書きでライト問題は解消です。 くまちゃんさん情報提供ありがとうございました。
フライト動画は別途撮ってみようと思ってます。
今は以下のようなデスクトップコックピットですが…。

サブスク更新するか否か…
CPFlightとSISMOをFSUIPCやSimconnectで直結できるようになれば必ずしもProsimに依存しなくてもいいんですが、ここはちょっと深めの思案中です。
(V3への更新に5.3万円かかるので)
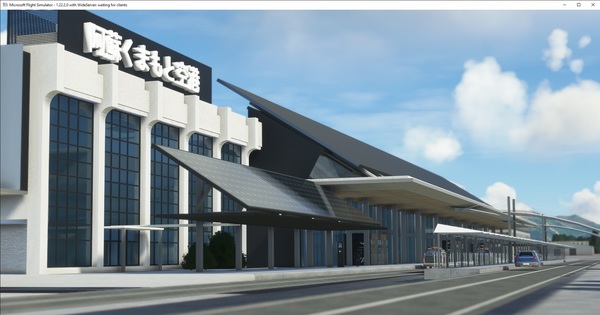
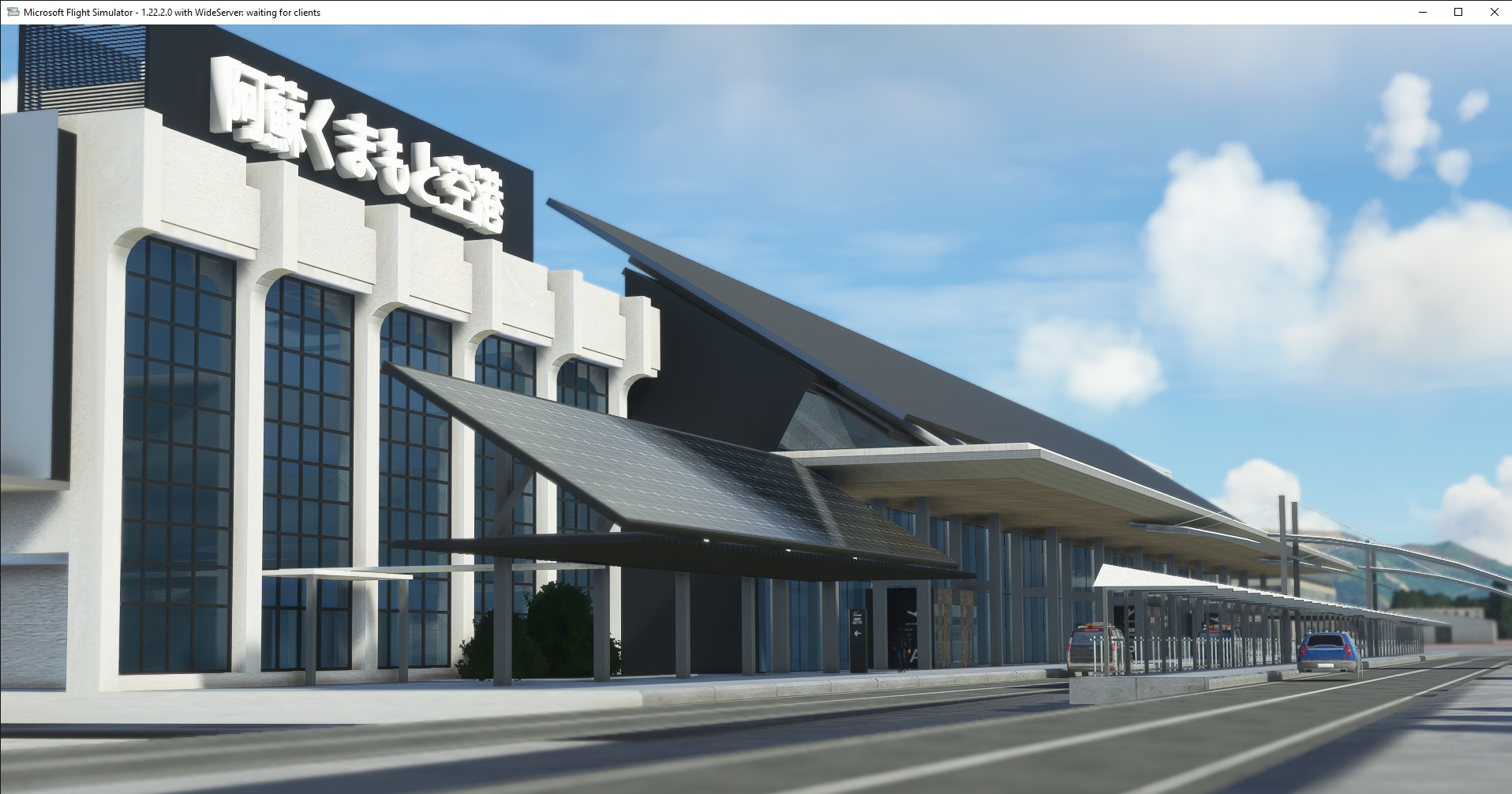
2022年2月22日 阿蘇くまもと空港シーナリー リリース! [Scenery制作]
というわけで、ようやくリリースにこぎつけました。
flightsim.toにてv0.9を公開中です。
https://flightsim.to/file/28444/rjft-kumamoto-airport-japan

v0.9としたのは、テクスチャ系未対応とか、ターミナルとタワー以外のオブジェクト作ってないとかの理由です。
かといって、v1.0の正式リリースをするかはわかりません。
なんせここまでで約50日、70-80時間の工数もかけてしまったのでしばらくはフライトしようかなーと。
ただ、使い方は一通りわかったのでここからは5-6割の時間でできそうな気もしますが。
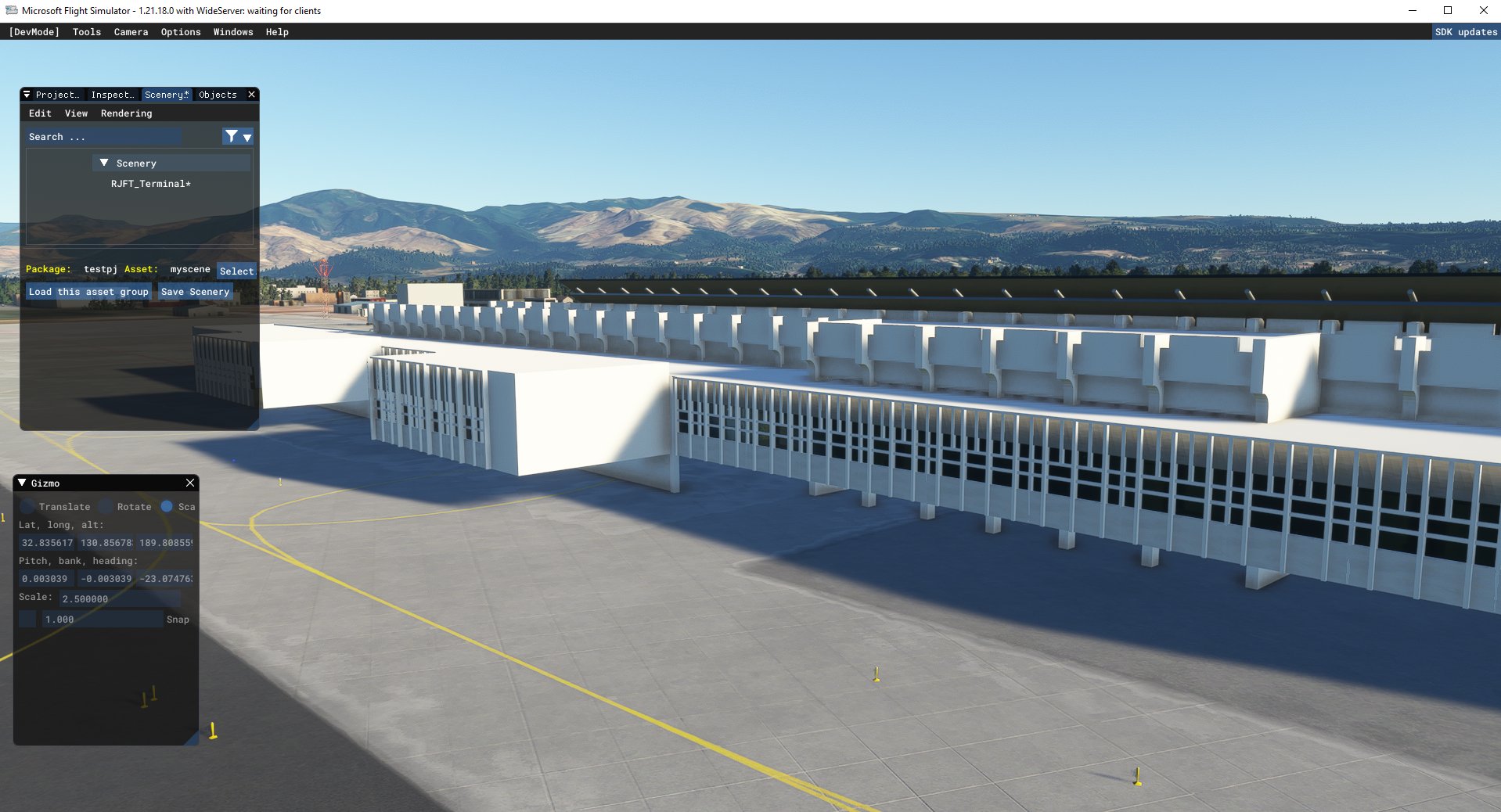
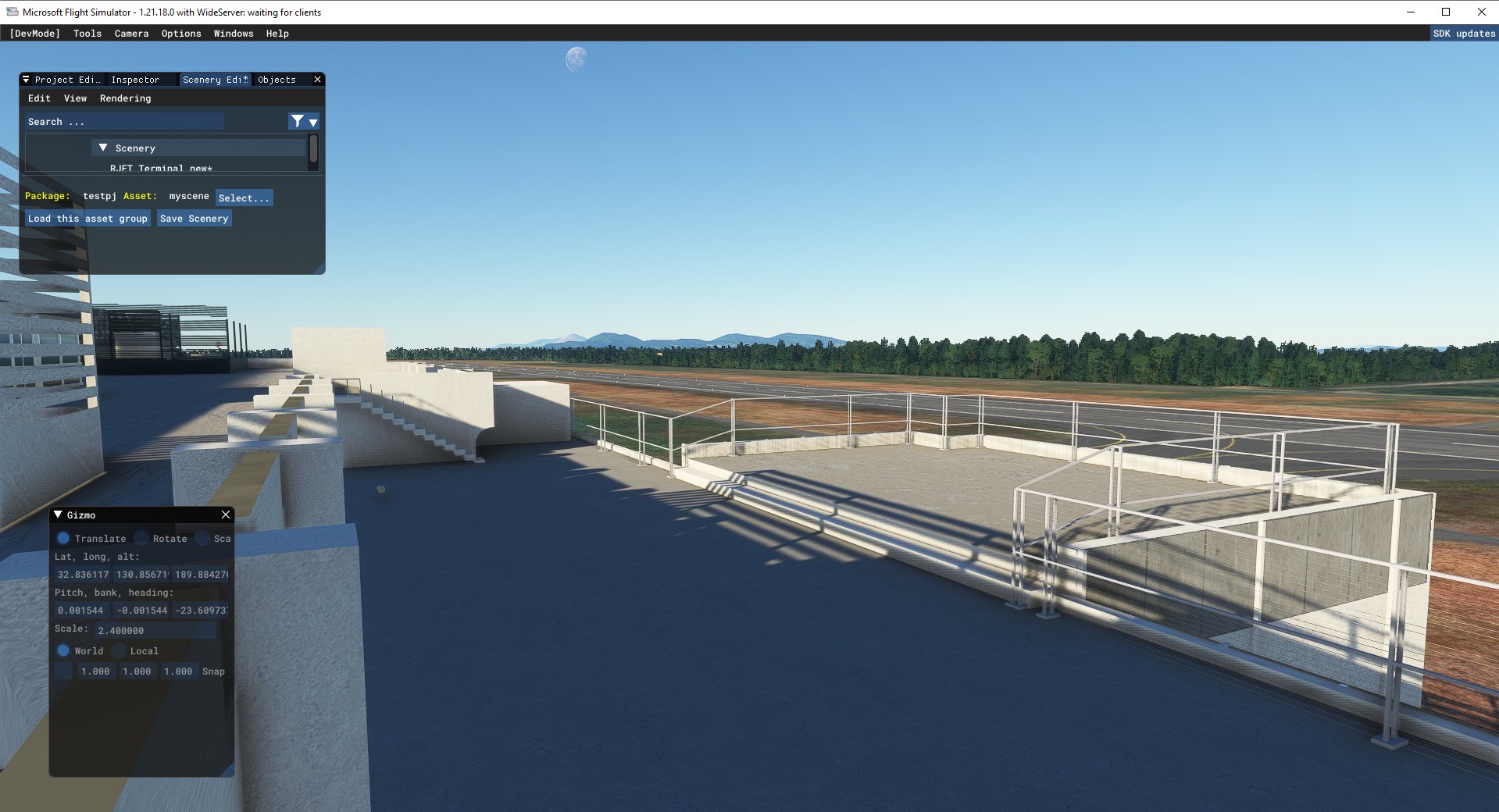
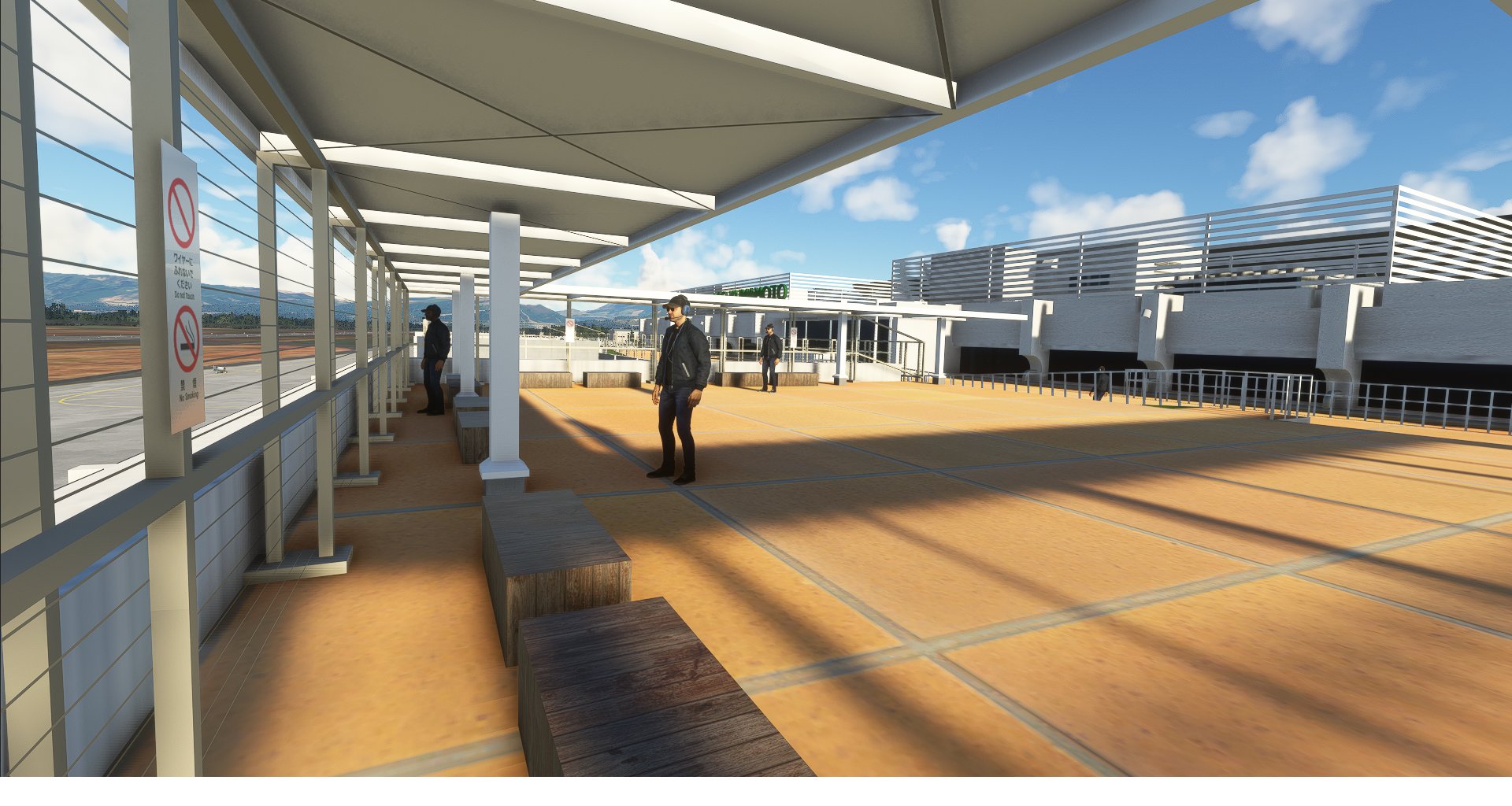
以下それなりにこだわったポイント
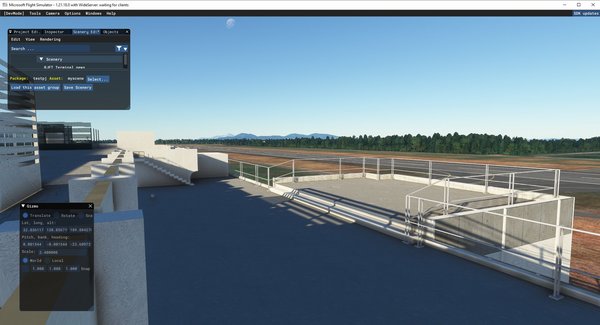
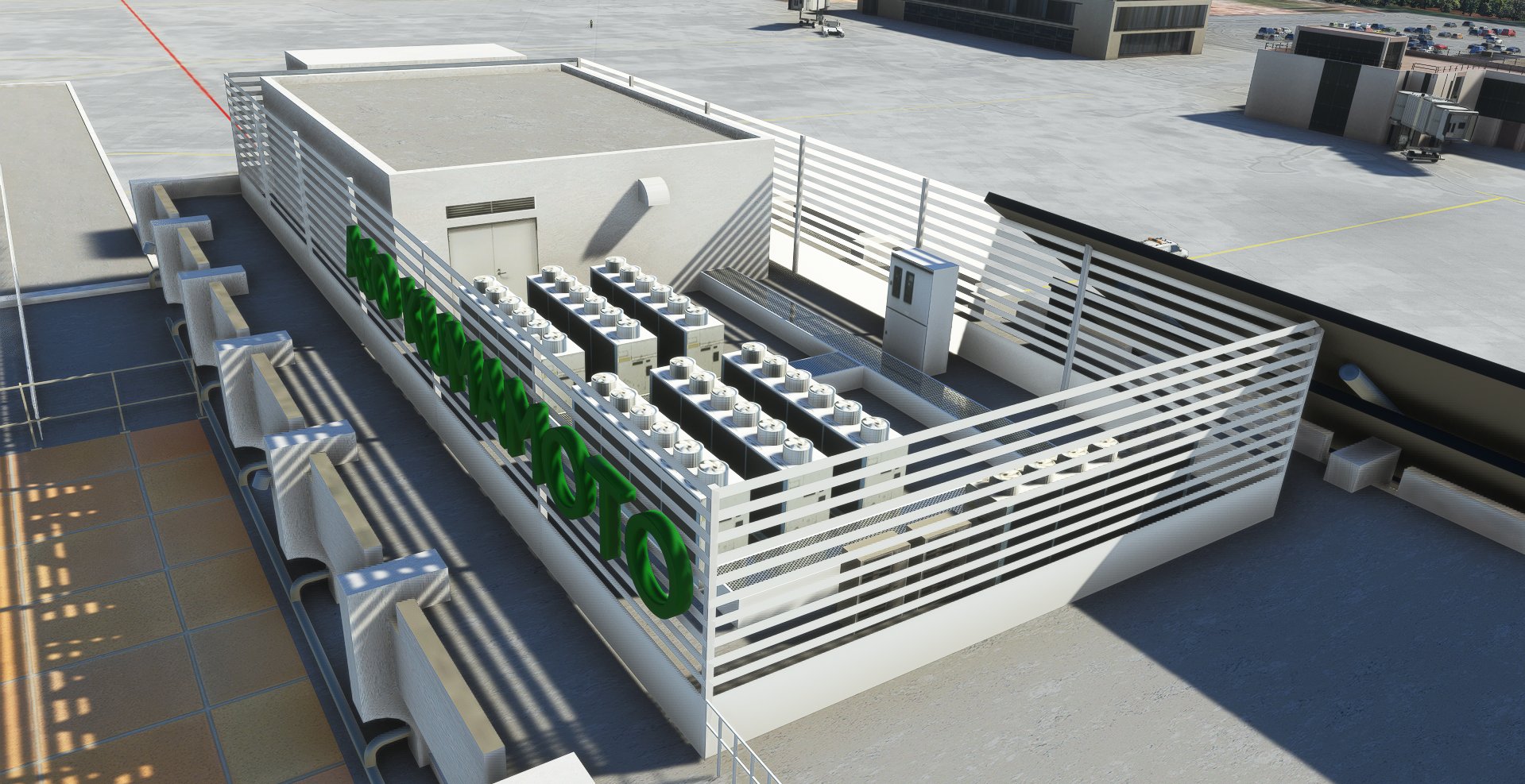
展望デッキ
コックピットの高さからはほぼ見えないんですけど、カメラをここに移動して手近をぼかして機体を撮影するっていうのに萌えるんすよね…。


管制塔
そもそもデフォルトで影も形もなかったオブジェクトです。
形が特殊なので初心者にはまぁまぁ難しかったです。
地味に階段をちゃんと作りました笑
こういう無駄とも思えるディティールが全体のリアリティを上げてくれるんですね。
まさに「神は細部に宿る」…。

PAPI
RW25はPAPIがなかったので追加しました。

Lead-in-Light
熊本空港は標高が高く天気が変わりやすいのと、すぐ奥に阿蘇山があるため、RW25側にはぐるーっとまわって最終進入するためのLead-in-Lightingシステムがあり、これを現時点の手持ちの技術で再現してみました。
本当はもっとバチッと光らせたいんですが、やりかたがわからず…。

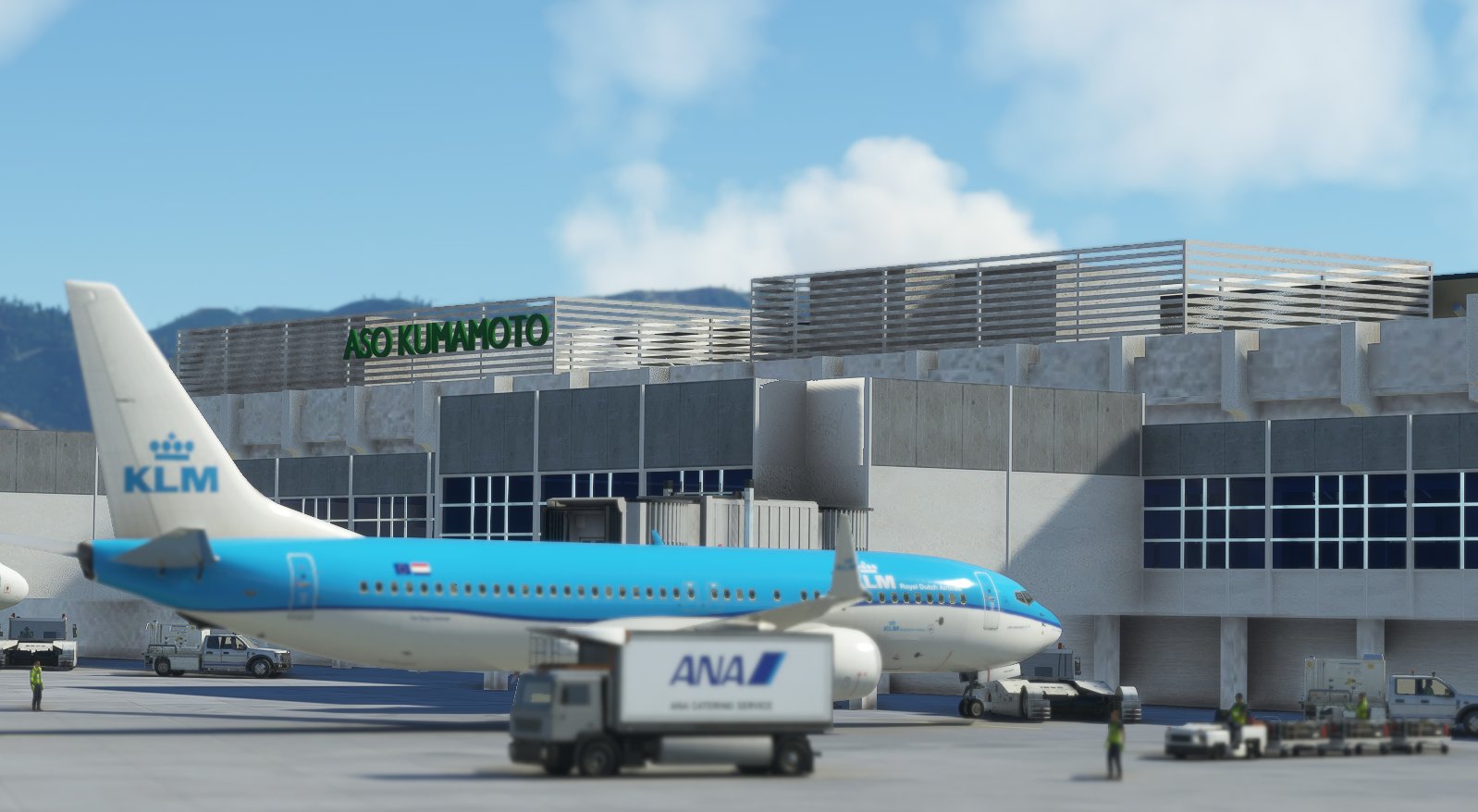
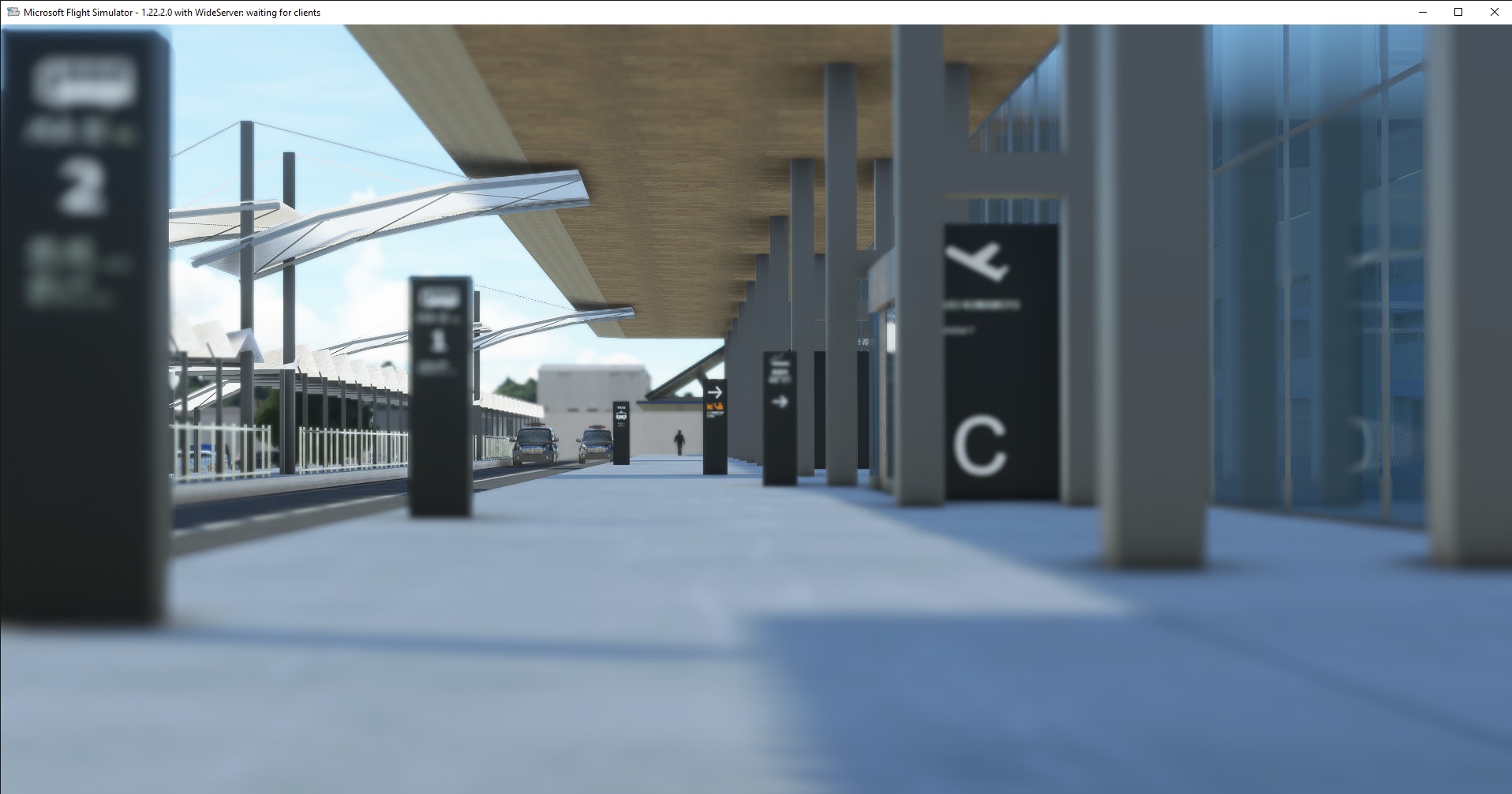
あとは情報量を多くして、奥行き感をしっかり出すこと、エプロンの照明を明るすぎるくらいにすること、あたりが拘りポイントになってます。
以下はかなり自分でもお気に入りのショットです。


よかったらDLしてフライトしてみてください!
flightsim.toにてv0.9を公開中です。
https://flightsim.to/file/28444/rjft-kumamoto-airport-japan

v0.9としたのは、テクスチャ系未対応とか、ターミナルとタワー以外のオブジェクト作ってないとかの理由です。
かといって、v1.0の正式リリースをするかはわかりません。
なんせここまでで約50日、70-80時間の工数もかけてしまったのでしばらくはフライトしようかなーと。
ただ、使い方は一通りわかったのでここからは5-6割の時間でできそうな気もしますが。
以下それなりにこだわったポイント
展望デッキ
コックピットの高さからはほぼ見えないんですけど、カメラをここに移動して手近をぼかして機体を撮影するっていうのに萌えるんすよね…。


管制塔
そもそもデフォルトで影も形もなかったオブジェクトです。
形が特殊なので初心者にはまぁまぁ難しかったです。
地味に階段をちゃんと作りました笑
こういう無駄とも思えるディティールが全体のリアリティを上げてくれるんですね。
まさに「神は細部に宿る」…。

PAPI
RW25はPAPIがなかったので追加しました。

Lead-in-Light
熊本空港は標高が高く天気が変わりやすいのと、すぐ奥に阿蘇山があるため、RW25側にはぐるーっとまわって最終進入するためのLead-in-Lightingシステムがあり、これを現時点の手持ちの技術で再現してみました。
本当はもっとバチッと光らせたいんですが、やりかたがわからず…。

あとは情報量を多くして、奥行き感をしっかり出すこと、エプロンの照明を明るすぎるくらいにすること、あたりが拘りポイントになってます。
以下はかなり自分でもお気に入りのショットです。


よかったらDLしてフライトしてみてください!
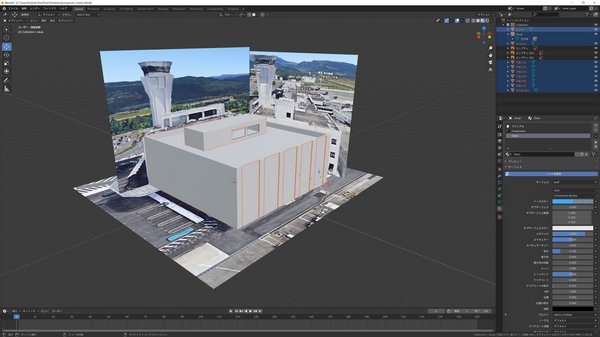
MSFS熊本空港シーナリー制作 [Scenery制作]
今年は新たな取り組みとしてMSFS2020のシーナリー制作に挑戦します!
これまでは職人のみなさんが作られたものをありがたく使わせていただいたり、購入してフライトしてましたが、どうしても自分で作ってみたいという気持ちに駆られ取り組んでみることにしました。
選定した場所は熊本空港です。
色々と所縁が深い空港なので思い入れがありますが、ターミナルは全面建て替えのため絶賛取り壊し中(2021年から解体に入り、2023年開業予定)なので、すでにこの現存しないものを作るというよくわからんスタートです(笑)
割とカクカクした構造物なのと、サイズ的にそんなに大きくないので、管制塔とターミナルくらいならなんとかやれるんじゃないか、という軽いノリで始めてみました。
デフォルトシーナリーでは熊本空港はこんなに殺風景…
管制塔も平面です。RW25はPAPIもないという。

1月3日 準備
Blender2.83、MSFS toolkit0.40.0、SDKのSampleファイルなどをダウンロードして準備
参考にさせていただいたサイト:MSFS掲示板
1月4日 管制塔ビル
なんとなく管制塔ビルを作り始めてみる。
操作方法もよくわからないのでだいぶ適当。
1月5日 管制塔
管制塔ビルの横に管制塔も構築してみる。
遠目に見るとなんとなーくそれらしいものができてきた。

1月9日 管制塔モデリング7割完成
なぜかBlenderから正常にエクスポート、MSFSへインポートできなくなったのでゼロから作り直し。
最初よりは要領を得て早くなってる。
サイズが適当なので奥行がちょっと足りない感じ。

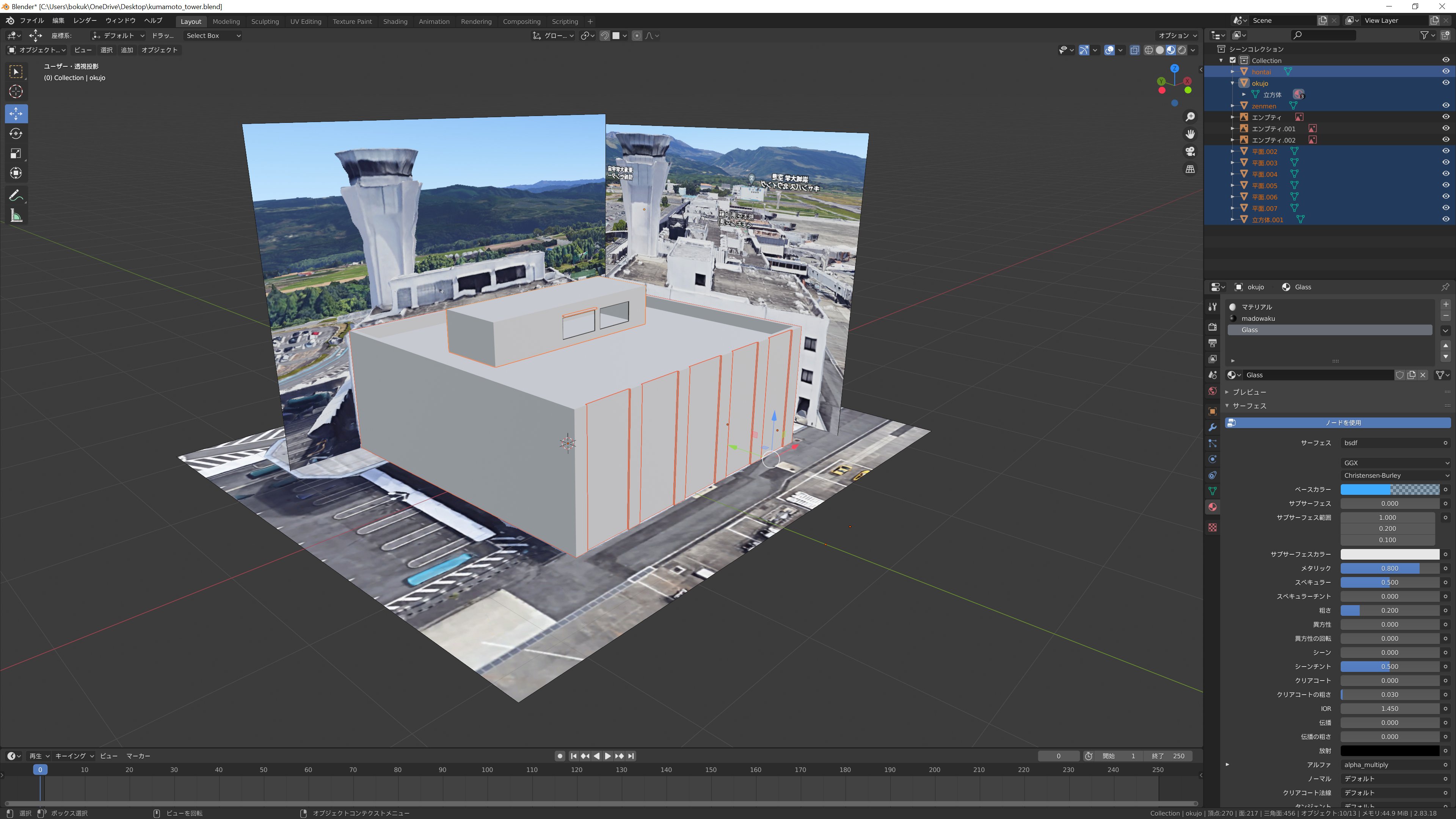
1月12日 国内線ターミナルビル着工
管制塔がきちんと完成しないまま、国内線ターミナルにも手を出し始める。
ここらでテクスチャをいじりはじめてますが、やはりテクスチャ貼ってマテリアル設定していくと格段に見栄えがよくなります。
マテリアルあたりは相当ちゃんと学ばないと理解できなそうなので、初心者でもできるパラメーターだけで進めます。
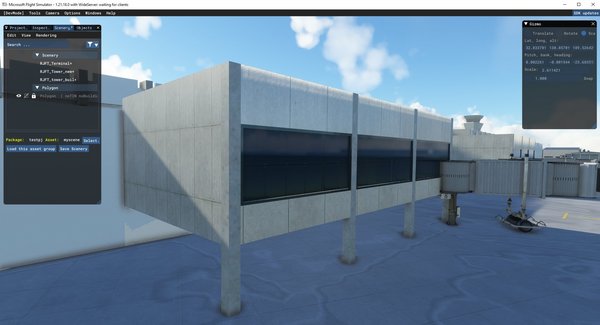
1月13日 引き続き国内線ターミナルビル
車寄せ側の大きな窓ガラスと窓枠を貼って雰囲気を楽しむ。
だんだん細部に行くにつれ、高さや幅、長さのバランスのずれが気になってくるので、調整が結構必要になってきます。
最初にしっかり測量が必要だと痛感。もう手遅れなので現物合わせで。
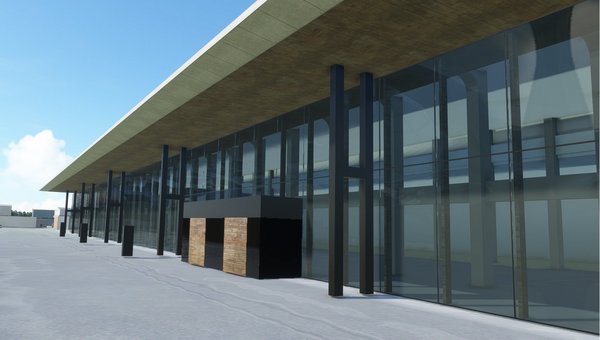
1月16日 窓枠設置工事
ゲート側側面のほとんどを占める窓と窓枠工事。
この凹凸表現は経験が必要そう。
変に作りこむとただ重たいだけになってしまうけど、技術がないのでひとまず重たいまま作りたいように作ってみる。
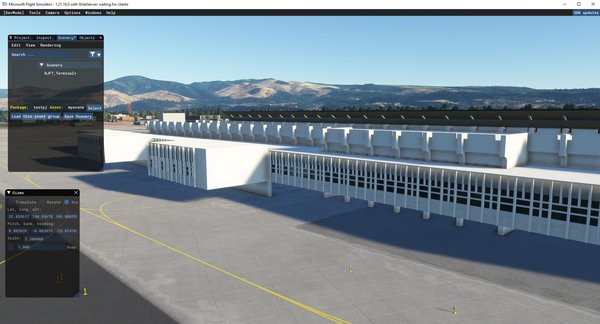
1月18日 窓枠設置工事
色やモデリング、テクスチャなど試行錯誤を重ね、ようやくいいかな、と思える状態に。


1月20日 自作テクスチャ
テキストだけだけど自作のテクスチャを入れてみる。

1月23日 屋上展望デッキ工事開始
1月26日 展望デッキほぼ完成。空調等設備工事開始
これはコックピットから見えないので正直手抜きするオブジェクト。
でないと重くなる。
ひとまず今回は作っちゃいます。


1月31日 車寄せ側外構工事開始

2月3日 国内線ターミナル工事ほぼ完了


2月7日 管制塔を仮置き

2月8日 国際線ターミナル着工
![Blender [C__Users_bokuk_OneDrive_Desktop_blender_WIP_RJFT_Terminal_new15.blend] 2022_02_09 10_40_16.jpg](https://kei-sim.c.blog.ss-blog.jp/_images/blog/_c3a/kei-sim/m_Blender205BC__Users_bokuk_OneDrive_Desktop_blender_WIP_RJFT_Terminal_new15.blend5D202022_02_092010_40_16.jpg)
このままだと終わりがない(笑)ので、2月22日にリリース日を設定し、これに向けて開発を進めつつその日になったら途中でもリリースしてしまう予定です。
せっかくなのでPVも作って告知。
さて、1発目のシーナリーMODはどうなることやら。
これまでは職人のみなさんが作られたものをありがたく使わせていただいたり、購入してフライトしてましたが、どうしても自分で作ってみたいという気持ちに駆られ取り組んでみることにしました。
選定した場所は熊本空港です。
色々と所縁が深い空港なので思い入れがありますが、ターミナルは全面建て替えのため絶賛取り壊し中(2021年から解体に入り、2023年開業予定)なので、すでにこの現存しないものを作るというよくわからんスタートです(笑)
割とカクカクした構造物なのと、サイズ的にそんなに大きくないので、管制塔とターミナルくらいならなんとかやれるんじゃないか、という軽いノリで始めてみました。
デフォルトシーナリーでは熊本空港はこんなに殺風景…
管制塔も平面です。RW25はPAPIもないという。

1月3日 準備
Blender2.83、MSFS toolkit0.40.0、SDKのSampleファイルなどをダウンロードして準備
参考にさせていただいたサイト:MSFS掲示板
1月4日 管制塔ビル
なんとなく管制塔ビルを作り始めてみる。
操作方法もよくわからないのでだいぶ適当。
1月5日 管制塔
管制塔ビルの横に管制塔も構築してみる。
遠目に見るとなんとなーくそれらしいものができてきた。

1月9日 管制塔モデリング7割完成
なぜかBlenderから正常にエクスポート、MSFSへインポートできなくなったのでゼロから作り直し。
最初よりは要領を得て早くなってる。
サイズが適当なので奥行がちょっと足りない感じ。

1月12日 国内線ターミナルビル着工
管制塔がきちんと完成しないまま、国内線ターミナルにも手を出し始める。
ここらでテクスチャをいじりはじめてますが、やはりテクスチャ貼ってマテリアル設定していくと格段に見栄えがよくなります。
マテリアルあたりは相当ちゃんと学ばないと理解できなそうなので、初心者でもできるパラメーターだけで進めます。

1月13日 引き続き国内線ターミナルビル
車寄せ側の大きな窓ガラスと窓枠を貼って雰囲気を楽しむ。
だんだん細部に行くにつれ、高さや幅、長さのバランスのずれが気になってくるので、調整が結構必要になってきます。
最初にしっかり測量が必要だと痛感。もう手遅れなので現物合わせで。
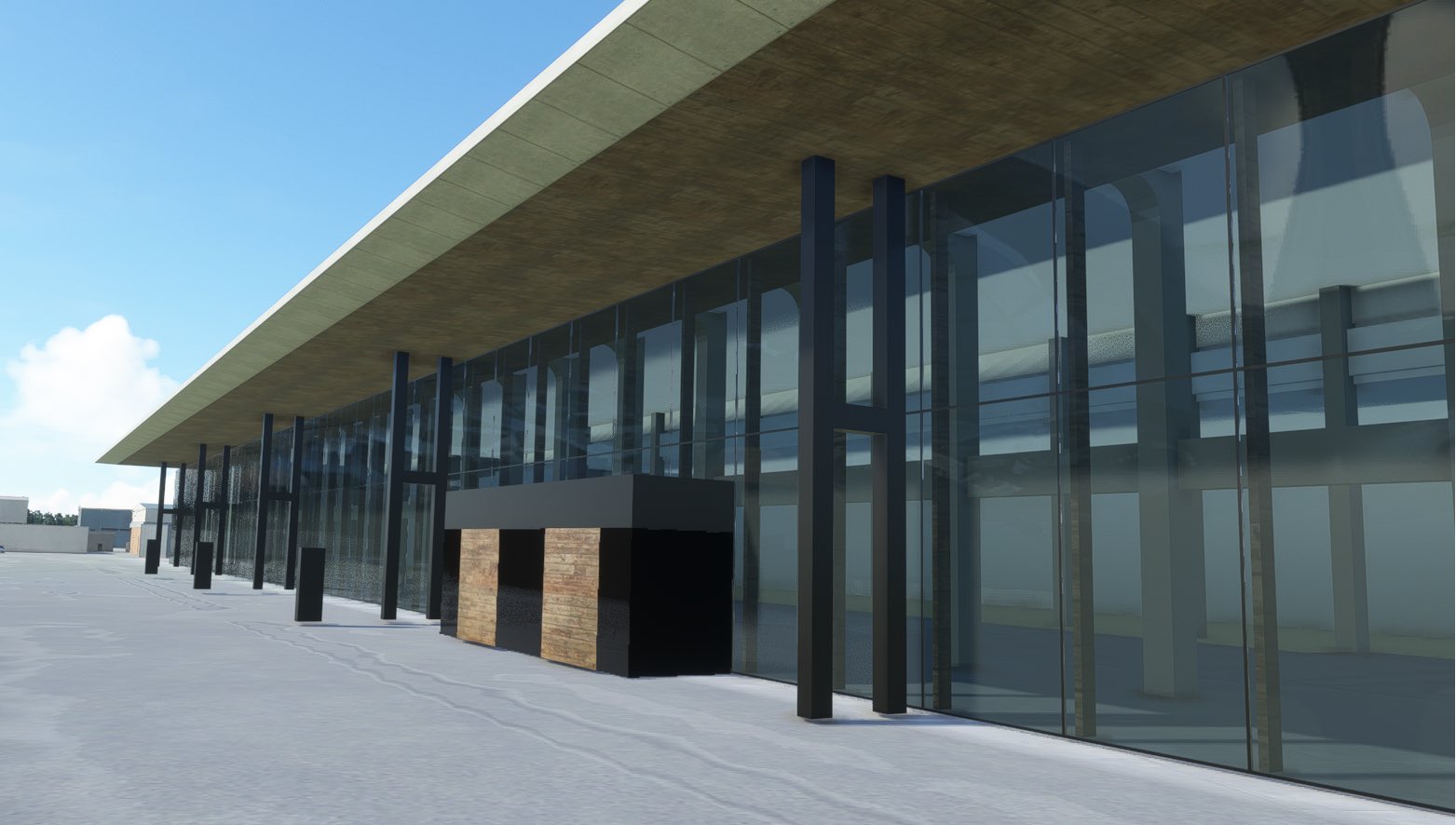
1月16日 窓枠設置工事
ゲート側側面のほとんどを占める窓と窓枠工事。
この凹凸表現は経験が必要そう。
変に作りこむとただ重たいだけになってしまうけど、技術がないのでひとまず重たいまま作りたいように作ってみる。
1月18日 窓枠設置工事
色やモデリング、テクスチャなど試行錯誤を重ね、ようやくいいかな、と思える状態に。

1月20日 自作テクスチャ
テキストだけだけど自作のテクスチャを入れてみる。

1月23日 屋上展望デッキ工事開始
1月26日 展望デッキほぼ完成。空調等設備工事開始
これはコックピットから見えないので正直手抜きするオブジェクト。
でないと重くなる。
ひとまず今回は作っちゃいます。
1月31日 車寄せ側外構工事開始

2月3日 国内線ターミナル工事ほぼ完了

2月7日 管制塔を仮置き

2月8日 国際線ターミナル着工
![Blender [C__Users_bokuk_OneDrive_Desktop_blender_WIP_RJFT_Terminal_new15.blend] 2022_02_09 10_40_16.jpg](https://kei-sim.c.blog.ss-blog.jp/_images/blog/_c3a/kei-sim/Blender205BC__Users_bokuk_OneDrive_Desktop_blender_WIP_RJFT_Terminal_new15.blend5D202022_02_092010_40_16.jpg)
このままだと終わりがない(笑)ので、2月22日にリリース日を設定し、これに向けて開発を進めつつその日になったら途中でもリリースしてしまう予定です。
せっかくなのでPVも作って告知。
さて、1発目のシーナリーMODはどうなることやら。
CPflightが正式にMSFS2020に対応 [MSFS2020]
手持ちのB737向けMCPとかVHFを他の機材で使えたらなーと思ってたんですが、21年10月28日にMSFS2020用ドライバーがCPFlightよりリリースされてました。
知らなかった…。
A32NX対応がメインなんですが、いわゆるMODの位置づけのFBWにCPflightが対応するってことは、FBWがMSFSにおけるA320のメインストリームだと認められたってことで、これはこれですごいことなのではないかと。
B738はMSFSではBREDOK3Dしか存在しないのでB3ユーザーにとってはまだまだ試練(?)が続きます。
ただ、今回のリリースでB3のデバイスもMSFS B747に接続できる、とのことなので、全機能は無理でも他機種(B747、B787、A320)でも使えるんじゃないか?ということで検証してみました。
手順がやや面倒なのでメモ。
CPflight MCP737のページからソフトウェア(ドライバ)をダウンロードして設定します。

1.上記FS2020_372(以降のバージョン)をダウンロードしてインストール
2.FSUIPC(http://www.fsuipc.com/)をV7.2.11以降へアップデート
3.FSUIPCからWASM (FSUIPC WASM Module 0.5.5a以降のバージョン)をダウンロード
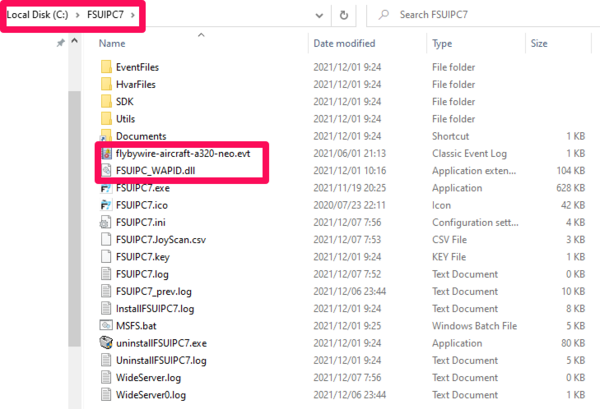
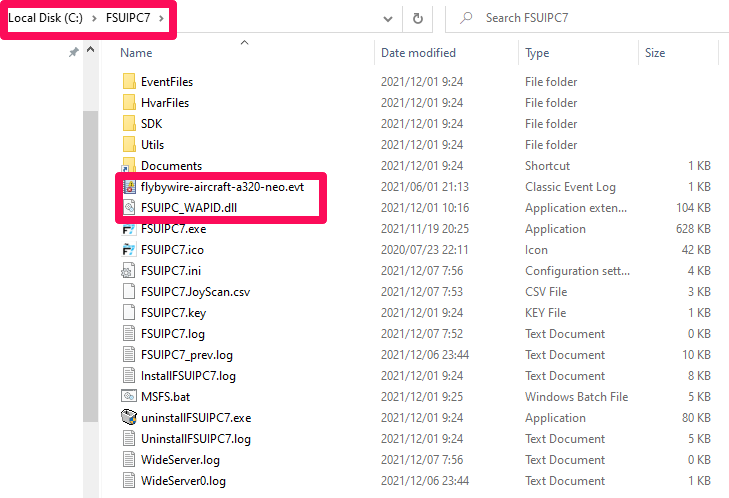
4.上記WASMを解凍し、「\FSUIPC-WASMv0.5.5d.zip\FSUIPC_WAPI.zip\FSUIPC_WAPI\dll」フォルダ内の「FSUIPC_WAPID.dll」をコピーし、「C:\FSUIPC7」フォルダに貼り付け
※MSFSのcommunityフォルダ内に「fsuipc-lvar-module」ができていることを確認
5.「FSUIPC7\EventFiles」フォルダ内から「flybywire-aircraft-a320-neo.evt」をFSUIPC7ルートフォルダ内へコピペ
4と5の手順の結果が以下
6.「C:\FSUIPC7」フォルダ内の「FSUIPC7.ini」をテキストで開き、以下4行を追記して上書き保存
[WAPI]
EnableWAPI=Yes
[EventFiles]
0= flybywire-aircraft-a320-neo.evt
7.MSFSが稼働しているIPアドレスを「CPflight.ini」に記入して上書き
8.MSFSを起動してB747でフライト開始
9.MCPに電源を入れた後、上記1でインストールした「C:\CPflight」フォルダ内の「FS_COM.EXE」を起動
10.MCPを接続しているUSB Port(COMポートナンバー)を指定
11.「connect」をプッシュし、MCP他HWの起動(通電)を確認
以降は、MSFS起動→747フライト開始→FS_COM起動→Connectの流れになります。
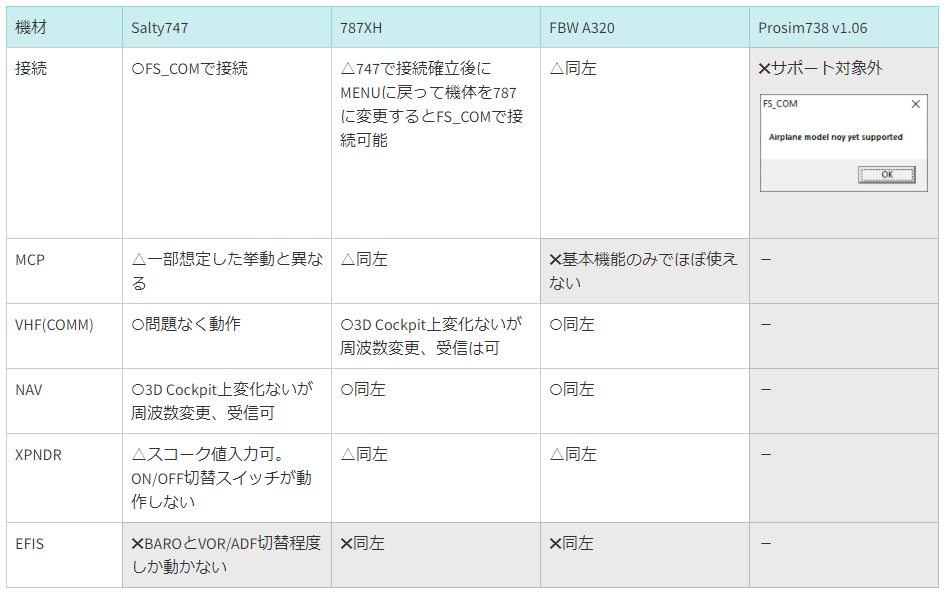
◆互換性
すべてを確認したわけではないですが、B747(Salty MOD導入済)やB787(B78XH MOD導入済)でもB737用のMCPを通じて主要な機能は使えました。
セレクターやAPボタン、LNAVなど共通のスイッチ入力「そのもの」は反応します。
一応点灯、消灯といったボタン単体の反応はある、という意味で、737の自動操縦とは挙動が異なるケースが結構発生する(VNAV、LNAVやLOCなど)ため、残念ながらMCPは原則3D Cockpit内でマウス操作が妥当そうです。(まぁ、設計そのものが違うのでそりゃそうです)
整理すると以下となります。
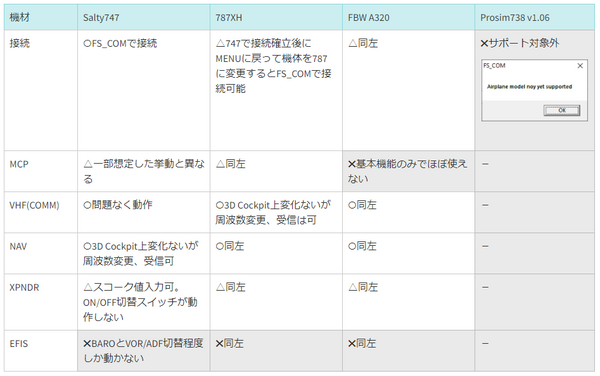
自分の場合はPilot2ATCやVATSIMでATCサービスを受けながら飛ぶので、VHF、NAVだけでも使えるようになるのは大きなメリットがあります。
いままで3D Cockpitでフライトする際はハードウェアが一切使えず画面上のマウスだけで操作してましたが、特によく触るVHF(ATC周波数変更)に関しては操作が楽になりました。
操縦しながら周波数や高度、スピードセレクターをマウスで変更するのキツイんすよね…。
FlightDeck SolutionsのCDUもMSFSにネイティブで対応してくれると言うことないなーと。
というかそもそも、FlyByWireのA320やXP11のZIBO737のように、MSFSにもメインストリームとなりうる737が登場してくれないことには話になりません…。
FBWやZIBOレベルの737が登場すると、Prosim737から離脱できる可能性が高まりますが…。(SISMO製オーバーヘッドをどうやってMSFSに繋ぐか問題は除く)
MSFS向け737はPMDGからいよいよ出そうなので期待してますが、ハードウェアのサポートがどうなるか…。
ま、いずれにしてもCPflightのMSFS対応は、コックピットビルダーにとって確かな一歩であることは間違いないです。
今後の展開に期待!
知らなかった…。
A32NX対応がメインなんですが、いわゆるMODの位置づけのFBWにCPflightが対応するってことは、FBWがMSFSにおけるA320のメインストリームだと認められたってことで、これはこれですごいことなのではないかと。
B738はMSFSではBREDOK3Dしか存在しないのでB3ユーザーにとってはまだまだ試練(?)が続きます。
ただ、今回のリリースでB3のデバイスもMSFS B747に接続できる、とのことなので、全機能は無理でも他機種(B747、B787、A320)でも使えるんじゃないか?ということで検証してみました。
手順がやや面倒なのでメモ。
CPflight MCP737のページからソフトウェア(ドライバ)をダウンロードして設定します。

1.上記FS2020_372(以降のバージョン)をダウンロードしてインストール
2.FSUIPC(http://www.fsuipc.com/)をV7.2.11以降へアップデート
3.FSUIPCからWASM (FSUIPC WASM Module 0.5.5a以降のバージョン)をダウンロード
4.上記WASMを解凍し、「\FSUIPC-WASMv0.5.5d.zip\FSUIPC_WAPI.zip\FSUIPC_WAPI\dll」フォルダ内の「FSUIPC_WAPID.dll」をコピーし、「C:\FSUIPC7」フォルダに貼り付け
※MSFSのcommunityフォルダ内に「fsuipc-lvar-module」ができていることを確認
5.「FSUIPC7\EventFiles」フォルダ内から「flybywire-aircraft-a320-neo.evt」をFSUIPC7ルートフォルダ内へコピペ
4と5の手順の結果が以下
6.「C:\FSUIPC7」フォルダ内の「FSUIPC7.ini」をテキストで開き、以下4行を追記して上書き保存
[WAPI]
EnableWAPI=Yes
[EventFiles]
0= flybywire-aircraft-a320-neo.evt
7.MSFSが稼働しているIPアドレスを「CPflight.ini」に記入して上書き
8.MSFSを起動してB747でフライト開始
9.MCPに電源を入れた後、上記1でインストールした「C:\CPflight」フォルダ内の「FS_COM.EXE」を起動
10.MCPを接続しているUSB Port(COMポートナンバー)を指定
11.「connect」をプッシュし、MCP他HWの起動(通電)を確認
以降は、MSFS起動→747フライト開始→FS_COM起動→Connectの流れになります。
◆互換性
すべてを確認したわけではないですが、B747(Salty MOD導入済)やB787(B78XH MOD導入済)でもB737用のMCPを通じて主要な機能は使えました。
セレクターやAPボタン、LNAVなど共通のスイッチ入力「そのもの」は反応します。
一応点灯、消灯といったボタン単体の反応はある、という意味で、737の自動操縦とは挙動が異なるケースが結構発生する(VNAV、LNAVやLOCなど)ため、残念ながらMCPは原則3D Cockpit内でマウス操作が妥当そうです。(まぁ、設計そのものが違うのでそりゃそうです)
整理すると以下となります。
自分の場合はPilot2ATCやVATSIMでATCサービスを受けながら飛ぶので、VHF、NAVだけでも使えるようになるのは大きなメリットがあります。
いままで3D Cockpitでフライトする際はハードウェアが一切使えず画面上のマウスだけで操作してましたが、特によく触るVHF(ATC周波数変更)に関しては操作が楽になりました。
操縦しながら周波数や高度、スピードセレクターをマウスで変更するのキツイんすよね…。
FlightDeck SolutionsのCDUもMSFSにネイティブで対応してくれると言うことないなーと。
というかそもそも、FlyByWireのA320やXP11のZIBO737のように、MSFSにもメインストリームとなりうる737が登場してくれないことには話になりません…。
FBWやZIBOレベルの737が登場すると、Prosim737から離脱できる可能性が高まりますが…。(SISMO製オーバーヘッドをどうやってMSFSに繋ぐか問題は除く)
MSFS向け737はPMDGからいよいよ出そうなので期待してますが、ハードウェアのサポートがどうなるか…。
ま、いずれにしてもCPflightのMSFS対応は、コックピットビルダーにとって確かな一歩であることは間違いないです。
今後の展開に期待!
【21/12/1追記】MSFS AI機をリアルに AIG AI-Manager [MSFS2020]
空港に到着して萎えるのがわけのわからんリペイント機がずらずら並んでること。
これ結構雰囲気壊されますね・・・。
ということで気になってたAIG AI Manager、Traffic Controllerを入れてみました。
羽田34Lからばんばん離陸したり、SID守らなかったり、超高速でタキシングしたり、滑走路手前に着陸したり、変なリペイントがいたり、ありえない機材がいたりといろいろありますが、雰囲気がめちゃくちゃよくなります。
これをフリーで提供くださる有志の方に感謝!!
羽田はこんな感じになります。
1タミ

2タミ

3タミ

駐機場

ちなみに成田はこんな感じ。
国際線多すぎてスポットが正確なのかわかりませんが、ANA1タミ、JAL2タミは合ってるのでおおむねよさそうな気配。(RJAAシーナリー:Drzewiecki Design)
1タミ

2タミ

ちゃんとプッシュバックして順番に出ていくのとか見てて飽きませんねー。
古いですが一応フライトスケジュール通りに飛ぶ(らしい)ので、見てるだけでも楽しいです。
天候変えたり、滑走路脇など好きな場所から眺められるのもポイント。
ただ、インストールで多少苦戦したのでメモ。
1.まずは、以下サイトで2つのSoftwareをダウンロード
https://www.alpha-india.net/
・AI-Manager AI機インストールツール
・Traffic Controller 上記AIをMSFSへ埋め込むツール
2.リペイントや機体ダウンロードでアカウントが2つ必要なので以下サイトのアカウントを取得
Alpha India Group Forum : https://www.alpha-india.net/forums/
AVSIM : https://www.avsim.com/
3.AI Managerを管理者権限で起動
しばらーく時間がかかります。
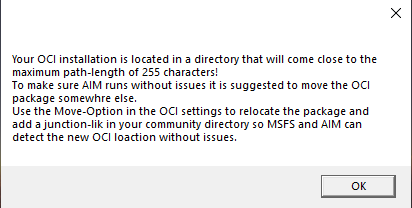
で、私の場合ここでエラーがでました。
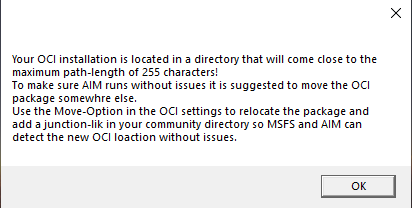
要するにフォルダ名がめちゃ長くなってうまく入らない事象が起こっているようです。
確かにMSFSのCommunityフォルダって長いんすよね…。
Windowsのレジストリ設定いじっても状況変わらず、いろいろ探し回って見つけたソリューションがこれ。
以下Reply6のpdfファイル。
https://www.alpha-india.net/forums/index.php?topic=37294.0
このアドオンを入れるフォルダをシンプルなフォルダ構成にしてインストールする、という方法です。
<対応手順>
①「F:/MSFS/Community」のようなシンプルなフォルダを新設
②起動したAI Managerの「Settings/AIGAIM-OCI」を表示し「setup」をクリック
③ポップアップした画面上のOCI-Directoryに①で新設した「F:/MSFS/Community」を指定
④「Setup」をクリックしてAIMを再起動。
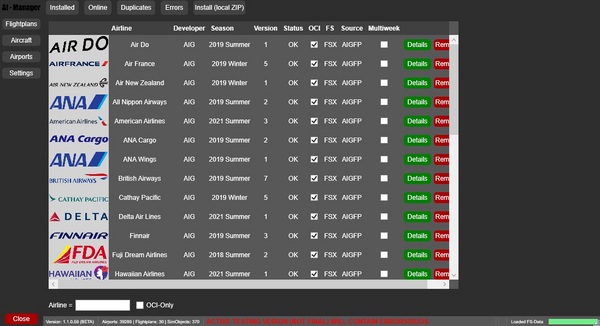
4.「Cookies」タブページで2サイトのアカウントでログイン
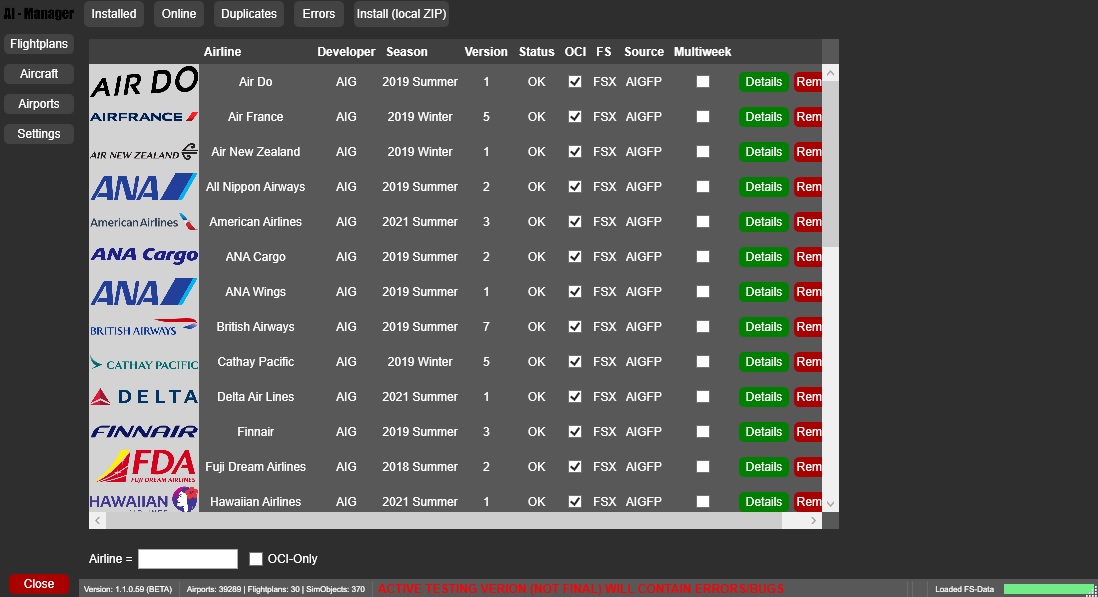
5.航空会社インストール
「Flightplan」で「Online」を選択し、導入したい航空会社をチェックして下部の「OCI-Bulk」をクリックすると該当の航空会社がインストールされる
6.MSFSを起動し、Traffic Controllerを起動、接続を確認
ひとまず羽田乗り入れの主要な航空会社を入れてみました。
基本国内空港を飛んでますが、楽しみが1つ増えました^^
◆他国内空港【21年12月1日追記】
他国内空港ですが、ちと厳しい状況です。
AIトラフィック用に各ゲートをどの航空会社が利用するのかを1つずつ設定する必要があるらしいです。
羽田についてはKaruchieさんがAI用にアップデートしてくださっているのでうまく各ターミナルに航空会社が表示されます。
https://jp.flightsim.to/file/12425/rjtt-tokyo-international-airport-revised-based-on-the-new-new-aerodrome-chart
成田も購入したシーナリーなので、ゲート設定があると思われ、それなりのAI機出現が実現できていると思われます。
これを他全空港シーナリーへ設定していくのは相当大変と思われます。
XPlaneはシーナリー編集方法を多少学びましたが、MSFSはいまだにわからないので自分では当面無理そう…。
これ結構雰囲気壊されますね・・・。
ということで気になってたAIG AI Manager、Traffic Controllerを入れてみました。
羽田34Lからばんばん離陸したり、SID守らなかったり、超高速でタキシングしたり、滑走路手前に着陸したり、変なリペイントがいたり、ありえない機材がいたりといろいろありますが、雰囲気がめちゃくちゃよくなります。
これをフリーで提供くださる有志の方に感謝!!
羽田はこんな感じになります。
1タミ

2タミ

3タミ

駐機場

ちなみに成田はこんな感じ。
国際線多すぎてスポットが正確なのかわかりませんが、ANA1タミ、JAL2タミは合ってるのでおおむねよさそうな気配。(RJAAシーナリー:Drzewiecki Design)
1タミ

2タミ

ちゃんとプッシュバックして順番に出ていくのとか見てて飽きませんねー。
古いですが一応フライトスケジュール通りに飛ぶ(らしい)ので、見てるだけでも楽しいです。
天候変えたり、滑走路脇など好きな場所から眺められるのもポイント。
ただ、インストールで多少苦戦したのでメモ。
1.まずは、以下サイトで2つのSoftwareをダウンロード
https://www.alpha-india.net/
・AI-Manager AI機インストールツール
・Traffic Controller 上記AIをMSFSへ埋め込むツール
2.リペイントや機体ダウンロードでアカウントが2つ必要なので以下サイトのアカウントを取得
Alpha India Group Forum : https://www.alpha-india.net/forums/
AVSIM : https://www.avsim.com/
3.AI Managerを管理者権限で起動
しばらーく時間がかかります。
で、私の場合ここでエラーがでました。
要するにフォルダ名がめちゃ長くなってうまく入らない事象が起こっているようです。
確かにMSFSのCommunityフォルダって長いんすよね…。
Windowsのレジストリ設定いじっても状況変わらず、いろいろ探し回って見つけたソリューションがこれ。
以下Reply6のpdfファイル。
https://www.alpha-india.net/forums/index.php?topic=37294.0
このアドオンを入れるフォルダをシンプルなフォルダ構成にしてインストールする、という方法です。
<対応手順>
①「F:/MSFS/Community」のようなシンプルなフォルダを新設
②起動したAI Managerの「Settings/AIGAIM-OCI」を表示し「setup」をクリック
③ポップアップした画面上のOCI-Directoryに①で新設した「F:/MSFS/Community」を指定
④「Setup」をクリックしてAIMを再起動。
4.「Cookies」タブページで2サイトのアカウントでログイン
5.航空会社インストール
「Flightplan」で「Online」を選択し、導入したい航空会社をチェックして下部の「OCI-Bulk」をクリックすると該当の航空会社がインストールされる
6.MSFSを起動し、Traffic Controllerを起動、接続を確認
ひとまず羽田乗り入れの主要な航空会社を入れてみました。
基本国内空港を飛んでますが、楽しみが1つ増えました^^
◆他国内空港【21年12月1日追記】
他国内空港ですが、ちと厳しい状況です。
AIトラフィック用に各ゲートをどの航空会社が利用するのかを1つずつ設定する必要があるらしいです。
羽田についてはKaruchieさんがAI用にアップデートしてくださっているのでうまく各ターミナルに航空会社が表示されます。
https://jp.flightsim.to/file/12425/rjtt-tokyo-international-airport-revised-based-on-the-new-new-aerodrome-chart
成田も購入したシーナリーなので、ゲート設定があると思われ、それなりのAI機出現が実現できていると思われます。
これを他全空港シーナリーへ設定していくのは相当大変と思われます。
XPlaneはシーナリー編集方法を多少学びましたが、MSFSはいまだにわからないので自分では当面無理そう…。
【21/12/1更新】サブスクAIRAC NAVIGRAPH使ってみた [MSFS2020]
更新履歴
・21年11月22日 サブスク終わったらどうなんのよ問題追記
・21年12月 1日 MSFSがNAVDATA参照できなくなる問題の解消方法メモ追記
---
いままでAIRACは単発購入で使ったことはあったんですが、Navigraphがサブスクに移行してからはちょっと遠ざかってました。
理由は毎月固定費になってしまうこと…。
サブスクはAmazonくらいしか使ってなくてあんまり好きじゃないんですよねー。
飽き性なので使う時と使わないときがあるんで性に合わないです。
フライトシムも飛ぶ時は毎日飛びますが、全然飛ばないときもあるので、年契約とかちょっと二の足降んじゃいます。
Prosimもこの理由でまだ契約してません。
◆Navigraph料金(21年8月時点)
Standard NAVデータのみ ①年25.9ユーロ
Ultimate NAVデータ+チャート ②年74.9ユーロ or ③月8.3ユーロ
本当は現時点のNAVDATAだけあればいいんですけど、かつてのように1サイクル分のデータだけ買うことはできないし、ひとまず月からやってみるかーっていう場合は③の1000円くらいで使えるコース一択です。
これ、最初にUltimate使わせてチャートの便利さを味わわせるっていう上手なサービスラインナップだなと思います(笑)
このチャートの機能がなかなか面白いです。
◆チャート機能
①チャート見放題
Jeppesenのチャートが見放題です。
ただ、日本にはAIS JAPANがあるので国内フライトが主であればそんなにいらないかも。
②MSFS2020のチャートパネル
これ便利です。
アプリをインストールすると、メニューバーにNavigraphのボタンが現れ、クリックするとMSFS内のアプリとしてチャートViewerが起動します。
こんな感じ↓
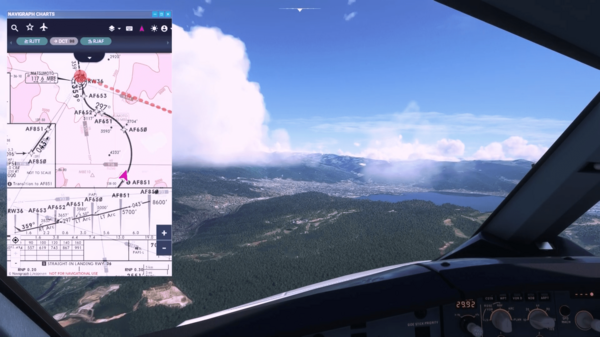
さらにエンルートチャート上にアプローチチャートなどをオーバレイすることができ、自分の機体位置も表示されるので、チャートで自機位置を確認しながらフライトするっていう楽しみ方ができます。
特に高度を細かく気にする必要があるRNAVのフライトが高度視認性が高まり、すごく楽になります。
実際にRNAVで使ってみた動画↓
③サードパーティ統合
上記②のチャートがサードパーティのEFBに統合されます。
ただ、MSFS2020はまだサードパーティの機体が少ないのであんまりメリットなく、②の利用価値の方が高い気がします。
④簡易ルーティング機能
一応簡易のルーティング機能はついてますが、これはあんまり使わないと思います。
実際のフライトルートと結構異なるので。
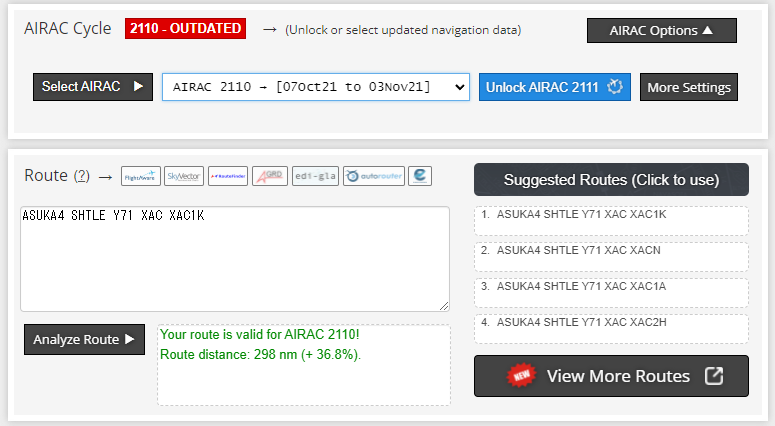
⑤Simbriefの連携
SimbriefはAIRACベースでルート設定ができます。
で、ルートをダウンロードしてMSFSにそのまま取り込めるので楽ちんです。
◆サブスクの終わり方
サブスクって終わり方が結構大事なんですよね。
わかりにくいものとか、自動延長とか、キャンセルしたら即座に終了しちゃうとか。
ここがネガティブなのもとっつきにくさの1つです。
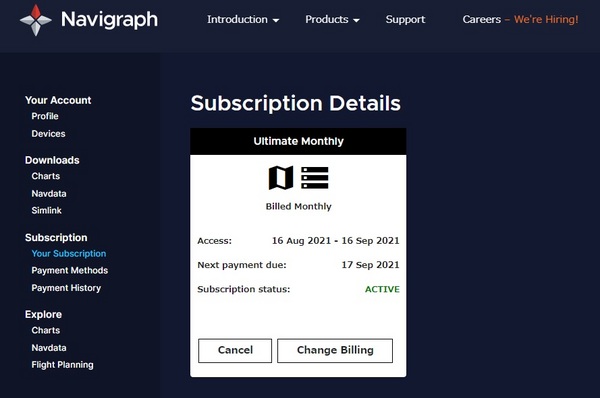
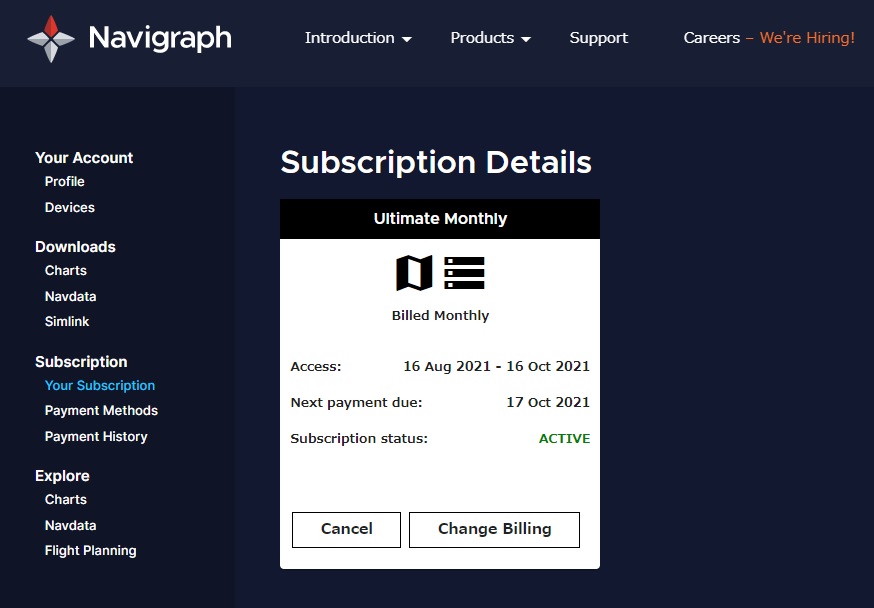
まず自分が契約したのが8月16日で、次回支払い期限が9月17日になってます。
今9月17日の朝なんですが、なんかまだ使えてます。
このまま放置しておくとサブスクが終わるのか勝手に更新されてしまうのか…。
で、9/17の夕方にアクセスしてみると、
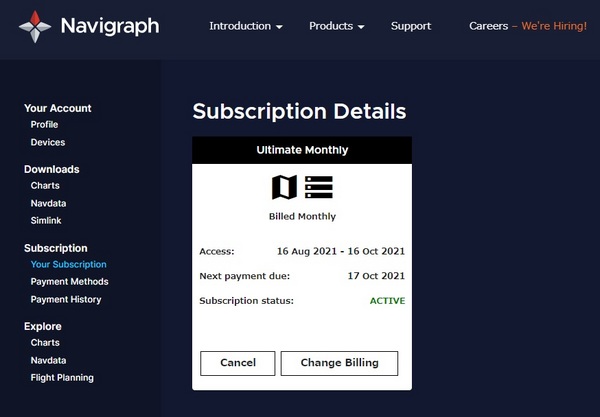
おおう!!
自動更新されとるやないかい!!SEPがOCTに変わってます。
ということで、10月16日まで使えることになりました(笑)
これUTCで動いてるんですね多分…。
表示されているCANCELボタンを押すと次回支払いがキャンセルでき、支払いが終わっている日までそのまま利用可能です。
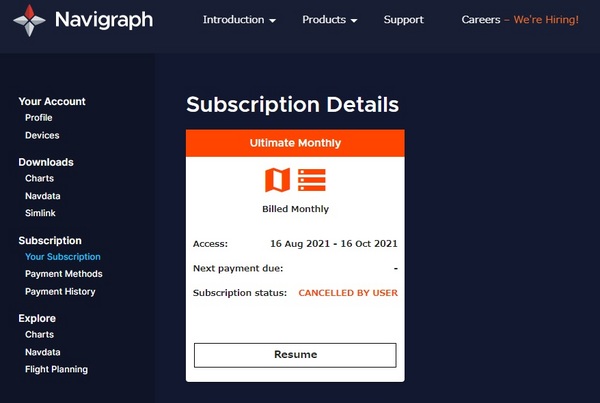
RESUMEを押せばサブスク継続可能です。
◆サブスク終わったらどうなんのよ問題【21年11月22日更新】
サブスク終わったので整理してみました。
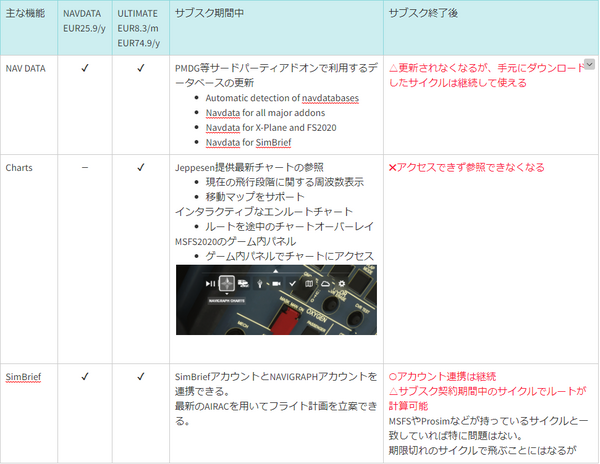
・NAVデータはダウンロードしておけば普通に使えます。
・チャートは見れません。(これもDLしておけば使えますが、日本にはAISJAPANがありますんで国内フライトなら不要)
・SimBrief連携はそのまま使えます。サブスクしてた期間を記憶していてその期間のサイクルを使ってルート計算ができます。
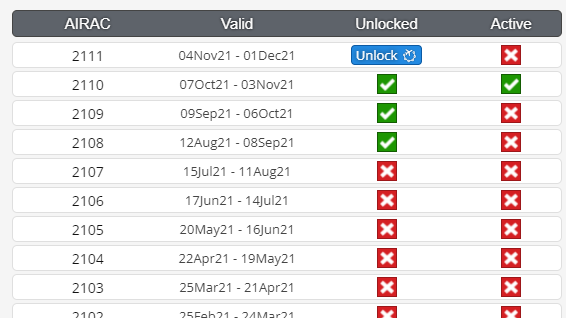
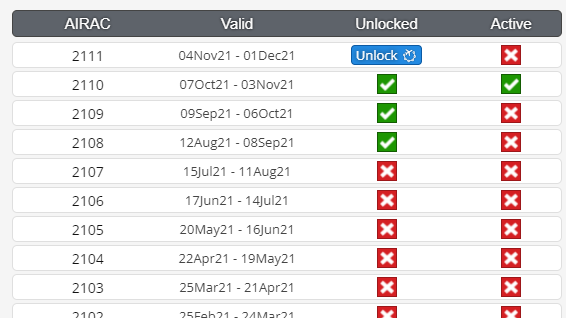
自分はサイクル2110まで使えるので2110でチェックはいってます。
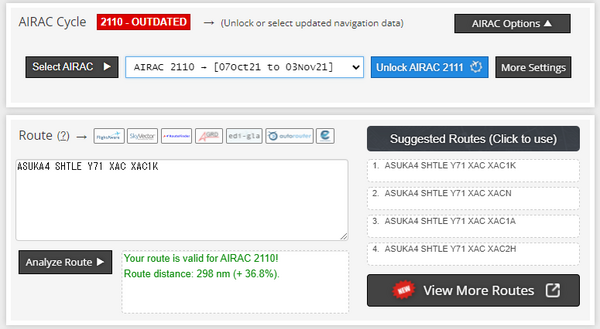
最新2111サイクルを使おうとすると以下のようにエラーが出ます。
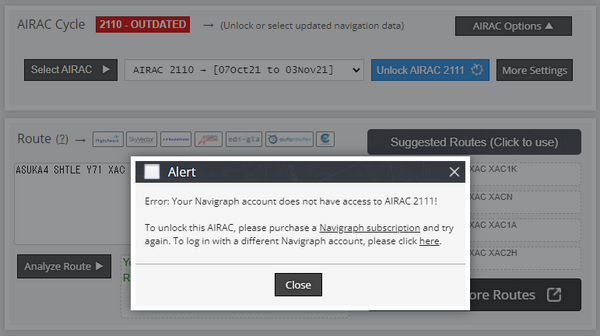
こんな感じで自分が使えるサイクルを保持されてます。
ということで、大幅にチャートが変わる時期を除けばサブスク契約してなくても自分の場合は特に問題ないですね。
オーバーレイでチャート見れるのは便利でしたが、代用は他でもできるのでいいかなと。
◆MSFS Navigraph ルートが表示されくなる問題【21年12月1日追記】
NAVIGRAPHからDLしたNAVDATAの参照をMSFSのNAVDATA参照に戻す場合の注意メモ。
MSFSは常にNAVIGRAPH提供のNAVDATAに無償でCycleアップデートされていきます。
つまりNAVIGRAPHのサブスクを途中でやめてしまうと、MSFSの方が新しいCycleになる事象が起こります。
自分の場合2110のMSFS版をDLして入れてましたが、無償の方が最新の2111になってしまったので、単純にcommunityフォルダからNavigraphデータを消したところ、MSFSでSIDやSTARなどのNAVDATAが全く表示されなくなる事象となりましたので、これの対処方法をメモしておきます。
■事象
MSFSを起動してフライトプランを入力する画面でSIDやSTARが全く表示されなくなる。
同様に、起動後のCockpit内でもFMS上でルートが全く表示されなくなる。
■原因
MSFSがNavigraphのNAVDATAがインストールされた「/Community/navigraph-navdata」フォルダへ参照しに行くが、NAVDATAが存在しないため
NavigraphはCycleデータを「Community」フォルダに「navigraph-navdata」フォルダを作成して格納する。
この際、AIRACは上記を参照するようcontents.xmlに追記する。(シーナリー等の順序が記録される設定ファイル)
Navigraphデータを1度インストールした後、上記NAVDATAが入ったフォルダを削除してしまうと、MSFSはcontents.xmlの指示通り、communityフォルダ内NAVDATAを見に行ってしまい、ルートが何も表示されなくなる。
■対処
上記contents.xmlファイルを削除してリビルドする。
もしくは、該当のNavigraphのレコードを1行削除する。
上記にて、MSFS自身が保持する最新のNAVDATAを参照しに行くようになる。
<参考>
https://forums.flightsimulator.com/t/removed-navigraph-now-no-data/394514/3
https://forum.navigraph.com/t/faq-uninstall-the-navdata-revert-back-to-the-stock-data/4853
・21年11月22日 サブスク終わったらどうなんのよ問題追記
・21年12月 1日 MSFSがNAVDATA参照できなくなる問題の解消方法メモ追記
---
いままでAIRACは単発購入で使ったことはあったんですが、Navigraphがサブスクに移行してからはちょっと遠ざかってました。
理由は毎月固定費になってしまうこと…。
サブスクはAmazonくらいしか使ってなくてあんまり好きじゃないんですよねー。
飽き性なので使う時と使わないときがあるんで性に合わないです。
フライトシムも飛ぶ時は毎日飛びますが、全然飛ばないときもあるので、年契約とかちょっと二の足降んじゃいます。
Prosimもこの理由でまだ契約してません。
◆Navigraph料金(21年8月時点)
Standard NAVデータのみ ①年25.9ユーロ
Ultimate NAVデータ+チャート ②年74.9ユーロ or ③月8.3ユーロ
本当は現時点のNAVDATAだけあればいいんですけど、かつてのように1サイクル分のデータだけ買うことはできないし、ひとまず月からやってみるかーっていう場合は③の1000円くらいで使えるコース一択です。
これ、最初にUltimate使わせてチャートの便利さを味わわせるっていう上手なサービスラインナップだなと思います(笑)
このチャートの機能がなかなか面白いです。
◆チャート機能
①チャート見放題
Jeppesenのチャートが見放題です。
ただ、日本にはAIS JAPANがあるので国内フライトが主であればそんなにいらないかも。
②MSFS2020のチャートパネル
これ便利です。
アプリをインストールすると、メニューバーにNavigraphのボタンが現れ、クリックするとMSFS内のアプリとしてチャートViewerが起動します。
こんな感じ↓

さらにエンルートチャート上にアプローチチャートなどをオーバレイすることができ、自分の機体位置も表示されるので、チャートで自機位置を確認しながらフライトするっていう楽しみ方ができます。
特に高度を細かく気にする必要があるRNAVのフライトが高度視認性が高まり、すごく楽になります。
実際にRNAVで使ってみた動画↓
③サードパーティ統合
上記②のチャートがサードパーティのEFBに統合されます。
ただ、MSFS2020はまだサードパーティの機体が少ないのであんまりメリットなく、②の利用価値の方が高い気がします。
④簡易ルーティング機能
一応簡易のルーティング機能はついてますが、これはあんまり使わないと思います。
実際のフライトルートと結構異なるので。
⑤Simbriefの連携
SimbriefはAIRACベースでルート設定ができます。
で、ルートをダウンロードしてMSFSにそのまま取り込めるので楽ちんです。
◆サブスクの終わり方
サブスクって終わり方が結構大事なんですよね。
わかりにくいものとか、自動延長とか、キャンセルしたら即座に終了しちゃうとか。
ここがネガティブなのもとっつきにくさの1つです。
まず自分が契約したのが8月16日で、次回支払い期限が9月17日になってます。
今9月17日の朝なんですが、なんかまだ使えてます。
このまま放置しておくとサブスクが終わるのか勝手に更新されてしまうのか…。

で、9/17の夕方にアクセスしてみると、
おおう!!
自動更新されとるやないかい!!SEPがOCTに変わってます。
ということで、10月16日まで使えることになりました(笑)
これUTCで動いてるんですね多分…。
表示されているCANCELボタンを押すと次回支払いがキャンセルでき、支払いが終わっている日までそのまま利用可能です。

RESUMEを押せばサブスク継続可能です。
◆サブスク終わったらどうなんのよ問題【21年11月22日更新】
サブスク終わったので整理してみました。

・NAVデータはダウンロードしておけば普通に使えます。
・チャートは見れません。(これもDLしておけば使えますが、日本にはAISJAPANがありますんで国内フライトなら不要)
・SimBrief連携はそのまま使えます。サブスクしてた期間を記憶していてその期間のサイクルを使ってルート計算ができます。
自分はサイクル2110まで使えるので2110でチェックはいってます。
最新2111サイクルを使おうとすると以下のようにエラーが出ます。

こんな感じで自分が使えるサイクルを保持されてます。
ということで、大幅にチャートが変わる時期を除けばサブスク契約してなくても自分の場合は特に問題ないですね。
オーバーレイでチャート見れるのは便利でしたが、代用は他でもできるのでいいかなと。
◆MSFS Navigraph ルートが表示されくなる問題【21年12月1日追記】
NAVIGRAPHからDLしたNAVDATAの参照をMSFSのNAVDATA参照に戻す場合の注意メモ。
MSFSは常にNAVIGRAPH提供のNAVDATAに無償でCycleアップデートされていきます。
つまりNAVIGRAPHのサブスクを途中でやめてしまうと、MSFSの方が新しいCycleになる事象が起こります。
自分の場合2110のMSFS版をDLして入れてましたが、無償の方が最新の2111になってしまったので、単純にcommunityフォルダからNavigraphデータを消したところ、MSFSでSIDやSTARなどのNAVDATAが全く表示されなくなる事象となりましたので、これの対処方法をメモしておきます。
■事象
MSFSを起動してフライトプランを入力する画面でSIDやSTARが全く表示されなくなる。
同様に、起動後のCockpit内でもFMS上でルートが全く表示されなくなる。
■原因
MSFSがNavigraphのNAVDATAがインストールされた「/Community/navigraph-navdata」フォルダへ参照しに行くが、NAVDATAが存在しないため
NavigraphはCycleデータを「Community」フォルダに「navigraph-navdata」フォルダを作成して格納する。
この際、AIRACは上記を参照するようcontents.xmlに追記する。(シーナリー等の順序が記録される設定ファイル)
Navigraphデータを1度インストールした後、上記NAVDATAが入ったフォルダを削除してしまうと、MSFSはcontents.xmlの指示通り、communityフォルダ内NAVDATAを見に行ってしまい、ルートが何も表示されなくなる。
■対処
上記contents.xmlファイルを削除してリビルドする。
もしくは、該当のNavigraphのレコードを1行削除する。
上記にて、MSFS自身が保持する最新のNAVDATAを参照しに行くようになる。
<参考>
https://forums.flightsimulator.com/t/removed-navigraph-now-no-data/394514/3
https://forum.navigraph.com/t/faq-uninstall-the-navdata-revert-back-to-the-stock-data/4853
前の10件 | -



